使用Creature强大的SpriteFrameManager管理和交换大量自定义绘制的精灵帧动画。最重要的是,Sprites交换到Creature可以变形并对底层的骨骼和网状电机作出反应。这意味着你可以通过精灵动画获得一些非常复杂的效果,比如响应物理或程序网格变形的闪烁火焰。
使用帮助
从静态图像行走恐龙
本文向您展示如何创建、网格、钻机和动画恐龙性格容易。它是一个伟大的介绍了解所需的核心概念产生角色动画。文档的最后,你应该有一个角色基本的走路腿运动中使用典型的步行周期。
下面是一个图显示整个人物创建动画��程:
啮合
步骤0:项目创建
所有字符项目存储在目录。点击创建项目的启动屏幕。你将提供一个新项目文件夹和一个角色阿特拉斯PNG格式的图像开始过程:
角色阿特拉斯形象的身体部位是一个图像文件,你的角色是不相交的方式。我们也应该喜欢广场图片方便布局和加载。这里有一个这样一个形象的例子:
点击创建,将创建新项目。
步骤1:啮合
我们需要网格字符为了动画的数字在屏幕上。你的角色会自动将通过网格创建过程当项目第一次初始化。应用程序将竭尽全力,为每个身体部分基于创建单独的网格开始网格分辨率。您将注意到在这种情况下网格区域已经为您创建和他们右边的窗口中列出:
啮合
在啮合模式有多种选择。如果你遇到问题,你需要单独的网格(因为身体图像太近),upr/downres网格分辨率为各种目的或想要雕刻/删除额外的三角形到网格区域,请深度阅读文档在这个网站的其他部分啮合。在进入下一个阶段之前,我们会喜欢提到你会发现一个工具,而有用的是边界再啮合的工具。这个工具允许你单独的网格区域在实例2单独的身体部位网格合并,因为他们提出了密切的阿特拉斯的形象。
##第二步:索具
2.1创建网格区域
与创建网格区域,我们将切换到操纵模式。在这种模式下,我们首先将该地区submode切换。点击Add按钮区域将我们的网格区域添加到平台:
添加了网格区域,进入并使用鼠标拖动操作移动/旋转/缩放区域到位:
这是最后的字符与布局网格区域看起来像:
2.2骨创造
肘骨的骨submode和启动过程的创造。在骨submode创建模式切换。按住并拖动屏幕上的骨骼开始创建角色:
骨头中创建一个层次结构。每个新创建的骨头的孩子之前创建的骨头。如果你想创建一个骨头,是不同的家长,切换到选择submode,单击所需的家长,然后切换回创建创建新骨。
这是最后一个骨钻机的样子:
2.3骨权重
这是操纵过程的最后一步。我们需要分配点骨头和每一网格之间重量值。这些值确定点网格变形的骨骼动画期间转换。
我们需要做的第一件事是确定哪些网格骨头在加权操作的影响。为此,我们切换submode重量。点击按钮并选择受影响的区域,网格为当前选中的骨头会受到影响:
默认情况下,所有网格。这应该为大多数身体部位除了工作的地方需要明确区分网格区域(例如,您��两个重叠的腿和你只希望腿骨的加权操作影响上面的腿但不是腿底部)。
有两种方法来分配权重:手动和自动。汽车最快和最容易的方法是加权得到很好地分配权重分配给你的网格区域:
作为一个快速入门,你可以最大迭代滑块以及影响滑块来得到一些合理的结果。接下来,单击Apply。这将汽车运行加权算法,将骨重量分配给所有相关的网格区域。
2.4测试
在进入动画之前,它总是一个好主意来测试我们的钻机。切换测试submode:
这种模式可以交互式地变换各种骨头钻机和观察网格反应/变形。这是一个很好的调试方法任何潜在的骨头权重或网状布局问题你可能有问题。继续拖累骨处理,看看你的操纵行为。一旦你对结果很满意,你可以移动到角色动画。
步骤3:动画
当你第一次进入动画模式,角色钻机将已经设置基本颗动画。这意味着你已经可以进入并拖动/旋转的骨头在一颗时尚和执行传统意义上的动画就像在任何其他动画程序:
当然,这个软件的真正力量是解锁的力量使用内置的程序上的物理引擎汽车。我们将演示是多么容易部署和动画这一概念,做一些腿部动画。
请注意,整个钻井平台已经可以手工动画。如果你想散步动画循环,腿骨头可以做得相当沉闷地设置关键帧动画在整个动画。这是耗费时间,不是很有效。输入程序的世界物理动画!
3.1腿动画使用物理过程
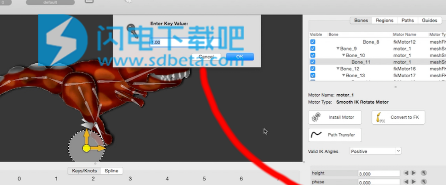
首先,选择3骨头的一条腿。然后点击安装马达:
一条腿运动在本质上不走循环的腿追踪某种半圆弧。剩下的骨头的腿应该提出了基于目标的自动提示的位置。我们刚刚合适的电动机工作!选择光滑的反向旋转马达。这个安装顺利反向旋转运动到3骨头的性格。
如果你现在按下“播���”,您将看到腿步行周期运动时尚。这是所有为我们做自动没有任何真正的努力!当然,结果并不完美,因此我们将开始调整电动机上的属性来达到所需的腿部运动效果。请注意,属性在所有的汽车都可以的所以你有动画/知识运动属性的额外的灵活性。
我们首先要做的是改变运动的轨迹。我们要模拟的腿行走平面。这意味着底部的圆弧应该是平的。我们将去scaleBottom属性设置为0。这使得弧平面的下方。我们还将高度属性设置为3时,腿抬上我们的飞机:
与属性集,我们得到以下结果:
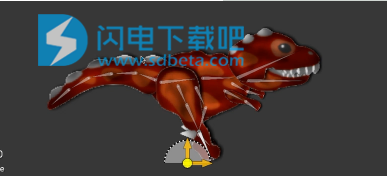
如果你现在媒体播放,你会得到一个不错的单腿行走运动。太酷了!注意几个键是为了完成这一相当复杂的动画!麻烦的是,这只是一个单腿行走。我们需要另一条腿走路!
来吧,安装一个光滑的反向旋转电机的其他3另一条腿的骨头。应用相同的attribue值我们做在前面的案例,我们得到以下:
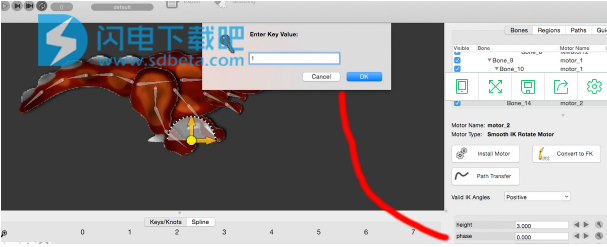
哦!2脚移动但是他们正在一致!我们不希望这样。走路腿应该彼此相反的移动。这种类型的运动称为阶段对彼此。我们可以完成这样一个任务顺利通过简单设置阶段属性反向旋转电机的腿1:
再次播放动画,我们得到一个行走恐龙(!):