Pix4Dmapper desktop破解版是一款功能强大的
专业无人机测绘领先的摄影测量软件,Pix4Dmapper是一种图像处理软件,它基于在图像之间自动查找数千个公共点。 在图像中找到的每个特征点称为关键点。 当发现2个不同图像上的2个关键点相同时,它们是匹配的关键点。 每组正确匹配的关键点将生成一个3D点。 当两个图像之间存在高重叠时,捕获的公共区域更大并且可以将更多关键点匹配在一起。 关键点越多,可以计算出更准确的3D点。 因此,主要规则是保持图像之间的高重叠。由于图像采集计划对结果的质量有很大影响,因此仔细设计图像非常重要。
Pix4Dmapper允许用户使用处理模板进行处理。 具有标签Rapid / Low Res的模板以低分辨率产生快速结果,可以在现场使用,作为数据集有多好的指标。如果快速/低分辨率处理不能产生良好的结果,很可能,数据集不够,需要再次获取图像。 在某些情况下,快速/低分辨率选项失败,而完全处理成功重建模型。Pix4Dmapper广泛应用于航测图,灾害应急,安全执法,农林监测,水利,防洪,电力线路检测,海洋环境和大学科研等领域,本次小编带来的是最新中文破解版,含安装破解图文教程,有需要的朋友不要错过了!
安装破解教程
1、在本站下载并解压,双击Pix4Dmapper中文破解版.msi运行,如图所示,点击next
2、勾选 I accept the terms in the License Agreement,点击next
3、点击浏览选择软件安装路径,点击next

4、点击install安装
5、安装中,稍等一会儿

6、安装完成,点击finish退出向导

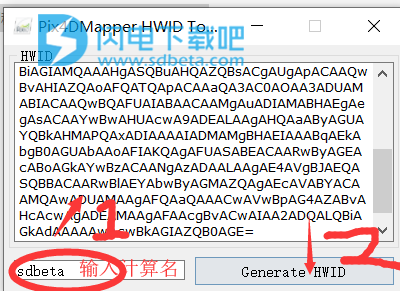
7、先不要运行软件,打开“硬件ID获取.exe ” ,在左下角输入“计算机全名”(不要输错),点击Generate HWID,将获取的机器码复制下来(不要复制漏了)。
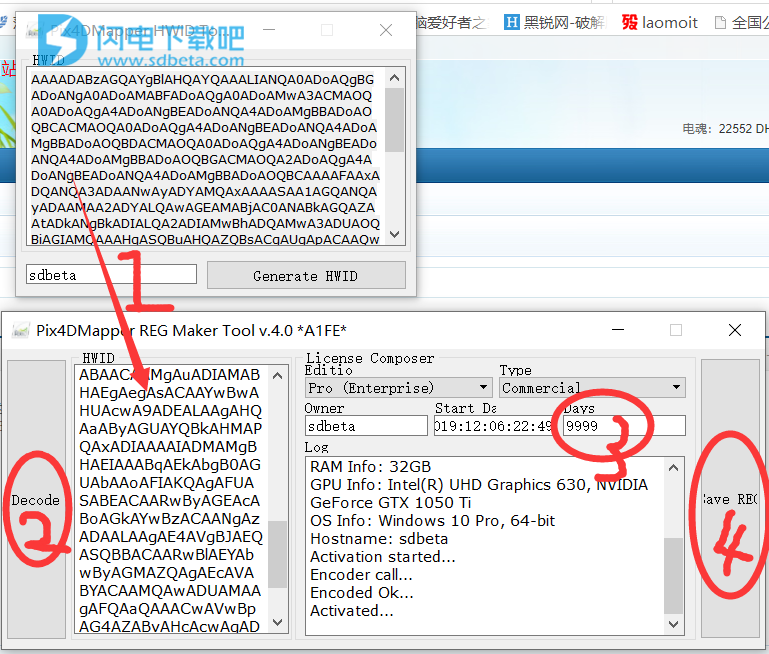
8、以管理员身份运行“4D-Permit-4X”将获取的机器码粘贴到HWID里面,单击左侧Decode键,将days里的1修改成9999点击SAve REG
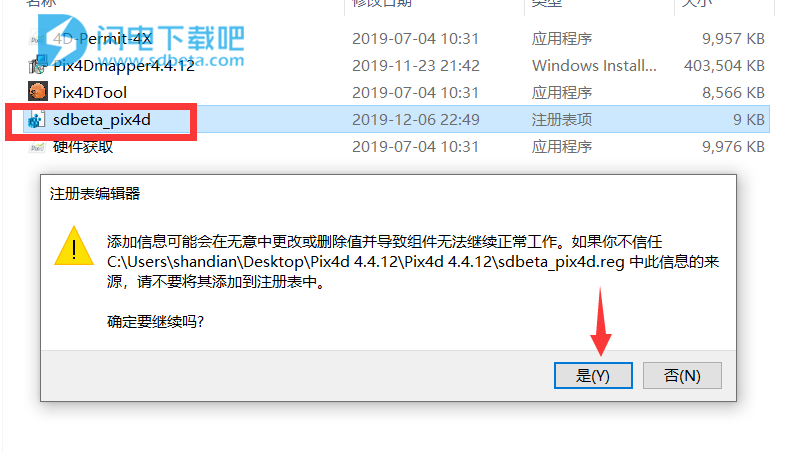
9、会在相同目录生成一个注册表打开注册表,
双击注册表,将注册表导入系统
10、使用软件前要先运行Pix4DTool工具

12、以管理员身份运行软件,无需注册,注册同意进入软件
13、激活完成,免费使用吧
软件特色
1、专业化和简化 - PIX4D映射器使摄影测量进入一个新时代。整个过程完全自动化,准确度更高,真正使无人机成为新一代专业测量工具。只需要一个简单的操作。如果没有专业知识,飞行控制器可以处理和查看结果并将结果发送给最终用户。
2、清空3,精度报告 - PIX4D映射器通过软件自动计算原始图像中的空方位元素。利用PIX4UAV技术和区域网络调整技术自动校准图像。该软件自动生成准确性报告,可以快速准确地评估结果的质量。提供详细和定量的自动空域,区域网络调整和地面控制点的准确性。
3、全自动,一键式 - PIX4D映射器不需要IMU,只需要图像的GPS位置信息,就可以全自动一键式操作,无需人工交互即可处理无人机数据。原生64位软件可以大大提高处理速度。 Orthophotos会自动生成并自动镶嵌,并将所有数据拼接成一个大图像。图像结果可以使用GIS和RS软件显示。
4、云端数据,多摄像机 - PIX4D映射器使用其独特的模型同时处理多达10,000个图像。能够处理由多个不同相机捕获的图像,允许将多个数据合并为一个项目进行处理。
软件功能
图像摄影测量工作流程数据采集
使用任何相机收集RGB,热或多光谱图像。 如果您使用的是无人机,可以使用Pix4Dcapture自动进行飞行和图像数据传输。
各种工具,为各行各业的应用提供动力
桌面和云端
1、调查结果
结果的亚厘米精度。
X,Y方向上的1-2像素GSD
Z方向上1-3个像素的GSD
用于测量的ICON Desktop软件
2、完全控制您的项目
定义感兴趣的区域,选择处理选项,添加地面控制点或编辑点云,DSM,网格和正交镶嵌。
3、您的工作流程,您的选择
使用默认模板进行自动处理或自定义设置,以完全控制质量,数据和项目。 选择何时以及如何使用云和桌面处理。
理解摄影测量的力量
将原始图像连接到3D重建的每个点的独特环境,可以直观地验证并提高项目的准确性。
创建对象和视频动画,测量距离和曲面。 编辑点云,添加地面控制点和手动连接点,定义处理区域等。
精确的3D地图和模型,纯粹来自图像
ICON自动点云分类
自动点云分类
ICON编辑完美的3个结果
平整和平滑数字表面
3D中的ICON测量
轻松测量表面,距离,体积和高度
ICON Inspect Annotate Share 3Dresults
检查和注释
ICON与Pix4D云安全地协作和共享
协作和分享
使用帮助
步骤1.开始项目之前
警告:质量不足的数据集会导致结果不佳或甚至可能导致处理失败。这需要在该字段上获取新数据集。
在使用Pix4Dmapper之前,必须在现场获取数据集(强制:图像,可选但建议:图像的地理位置和地面控制点(GCP))。需要一个好的数据集才能自动生成高质量和高精度的结果。为了获得一个好的数据集,请按照以下步骤操作:
1.设计图像采集计划:设计一个良好的图像采集计划非常重要,考虑到:
项目类型(空中,陆地,混合)。
地形/物体的类型。
相机类型。
项目的目的。
拍摄图像的图像速率。
拍摄图像的距离(飞行高度)以及拍摄图像的角度。
拍摄图像时要遵循的路径。
等等
对于航空项目,这也意味着:
选择走廊路径或常规网格和/或圆形网格。
决定是否使用地面图像。
如果需要多个航班覆盖整个区域:设计每个航班覆盖的区域。
2.配置摄像机设置:需要配置用于获取图像的摄像机设置。错误的配置可能导致图像模糊,噪音,扭曲等。
3.地理配准图像(可选但推荐):可以使用内置GPS或使用外部GPS设备的相机对图像进行地理配准。
4.在现场或通过其他来源获取GCP(可选但建议):使用GCP需要规划必须获取的GCP数量,以及必须在何处以及如何测量它们。
第2步。创建项目
要创建项目,请按照下列步骤操作:
1.创建一个新项目。
2.导入图像。
3.配置图像属性:
如果图像具有地理位置:
定义坐标系并导入图像地理位置信息。
如果软件无法识别相机型号或需要使用不同的相机参数:
编辑相机型号。
4.选择输出/ GCP坐标系。
5.选择处理选项模板
创建一个新项目
要创建新项目:
1.启动Pix4Dmapper。
2.在菜单栏上,单击项目>新建项目...
3.“新建项目”向导将打开:
4.在名称中:键入项目的名称。
5.(可选)在“创建于”中:单击“浏览”...在“选择项目位置”弹出窗口中,导航以选择将存储项目和结果的文件夹,然后单击“选择文件夹”。
警告:确保:
项目名称不使用特殊字符。
将创建项目的路径不使用特殊字符。
项目名称和路径一起包含少于128个字符。
注意:向导完成后,将在所选文件夹中创建以项目命名的文件夹,它将存储所有结果。
6.(可选)选中“用作默认项目位置”复选框以将所有新项目保存在所选文件夹中。
7.在“项目类型”中,保持选择“新建项目”的默认选项。
8.单击下一步。
步骤3.处理前(可选)
创建项目后,将显示“地图视图”。
在处理之前可以执行一些可选步骤:
1.(可选)选择处理区域
默认情况下,选择进行处理的区域对应于校准的所有图像所覆盖的整个区域。可以将处理区域限制在感兴趣的区域,但这不是强制性的。此选项可用于仅为感兴趣的区域而不是整个区域生成输出。
有关创建处理区域的分步说明:202560179。
2.(可选)更改处理选项模板和/或处理选项
更改输出结果文件(类型和格式),更改某些处理选项以在需要时提高结果质量,或更改某些处理选项以供高级使用。有关更多信息:202560009。
注意:有关处理选项模板的详细信息,它们生成的输出及其选定的处理选项:205319155。
3.(可选)添加GCP
添加地面控制点(GCP)以提高项目的全局准确性(地理配准)。可以使用地形方法在现场测量GCP,这些方法取自现有的地理空间数据或Web地图服务(WMS)。
警告:在处理没有图像地理定位的图像时,强烈建议使用GCP。
如果没有使用地面控制点:
最终结果未按比例缩放,定向或地理参考。因此,它们不能用于测量,叠加和与先前结果的比较。
他们可能会在rayCloud中生成倒三维模型。
可以移动最终的3D模型(可以使用手动连接点来校正此问题:360000395103)。
有关如何在项目中包含GCP的分步说明:202560239。
第4步。处理
一、初始处理
要开始处理项目:
1.在菜单栏上,单击“视图”>“处理”。
process.jpg
2.处理栏将在主窗口的底部打开。
3.确保选择
1)初始处理和2)点云和网格和3)未选择DSM,正交马赛克和索引:
4.单击“开始”。
二、分析质量报告
重要:
有关如何分析质量报告的详细说明:202558689。
有关质量报告中描述的任何参数的详细说明:202558679。
作为附件提供的质量报告示例。
完成步骤1.初始处理完成后,将自动显示质量报告。要不自动显示,请取消选择质量报告底部的“自动处理后显示”框。
按顺序处理多个步骤时,仅在处理完成时才在结果文件夹中生成PDF质量报告。但是,一旦完成一步,它将自动显示在Pix4D Desktop中。
建议在质量报告中验证以下信息:
1.质量检查
验证:
所有检查都是绿色的。
所有或几乎所有图像都在一个块中校准。
初始和优化的内部摄像头参数之间的相对差异低于5%。
(可选)如果使用GCP,GCP错误低于3×GSD。
2.预览
对于具有最低点图像且已生成正交马赛克预览的项目,请验证orthomosaic:
不包含洞。
没有扭曲。
(可选)如果使用了GCP或图像地理定位,则其方向正确。
3.初始图像位置
(可选)如果图像具有地理位置,请验证“初始图像位置”图形是否与飞行计划相对应。
4.计算图像/ GCP /手动连接点位置
验证:
(可选)如果使用具有地理位置的图像,则计算的图像地理定位良好。
(可选)如果仅使用具有地理位置的图像,则不确定性椭圆的大小相似。
(可选)如果使用GCP,GCP的误差很小(输入和计算GCP之间的差异很小)。
(可选)如果使用具有地理位置的GCP和图像,则不确定性椭圆在GCP附近非常小,并且对于更远的图像可能会增加。
5.绝对相机位置和方向不确定性
验证:
对于仅具有图像凝胶定位的项目,绝对摄像机位置不确定性与GPS精度相似,并且西格玛小于平均值。
对于具有GCP的项目,绝对摄像机位置不确定性与GCP的准确性类似。
6. 2D关键点匹配的3D点
验证:
已经在图像之间计算了足够的匹配。
该图由一个块组成。如果存在多个块,则每个块将具有不同的颜色。
整个项目中不确定性椭圆的大小大致相同。
7.地理定位细节
(可选)如果使用GCP,请验证:
所有GCP都被考虑在内(在地理定位和地面控制点表中不显示红色)。
所有标记的GCP都已经过验证。
8.处理选项
验证:
(可选)如果使用GCP,则地面控制点(GCP)坐标系是正确的。
(可选)如果使用具有地理位置的图像,则图像坐标系是正确的。
3.点云和网格
处理步骤2.点云和网格:
1.在菜单栏上,单击“视图”>“处理”。
2.处理栏将在主窗口的底部打开。
3.确保选择了2.点云和网格,并且未选择1.初始处理和3. DSM,正交马赛克和索引。
4.单击“开始”。
DSM,Orthomosaic和Index
处理步骤3. DSM,Orthomosaic和Index:
1.在菜单栏上,单击“视图”>“处理”。
2.处理栏显示在主窗口的底部。
3.确保选择了3. DSM,Orthomosaic和Index,以及1.初始处理和2.点云和网格未被选中。
4.单击“开始”。
Pix4Dmapperdesktop.rar/Pix4Dmapperdesktop4.rar