CosiMate9.0破解版提供了框架,用于链接表示物理和数学系统的不同抽象级别的异构模拟器。使用基于协同仿真总线的开放式架构,该解决方案提供两个主要优势,一个支持多点集成和异构模拟器通信的开放式架构,以及在整个网络中模拟模型优化CPU使用和仿真性能的能力。随着汽车,航空航天和通信等领域系统日益复杂,集成软件,硬件和机械组件变得越来越具有挑战性。在许多工程组织中,复杂系统的设计通常需要来自不同专业领域的若干团队使用不同的开发和验证工具进行合作。在实际实施之前,系统工程师今天需要能够在开发周期和不同的抽象级别尽早验证整个系统的行为。本次小编带来的是CosiMate9.0最新破解版,含安装激活教程!

安装破解教程
1、在本站下载并解压,得到CosiMate 2017.07 v9.0.0 Win64 Full Package.iso安装镜像和_SolidSQUAD_破解文件夹

2、首先我们安装CosiMate 2017.07 Win64运行,加载CosiMate 2017.07 v9.0.0 Win64 Full Package.iso镜像文件,双击CosiMate 2017.07 v9.0.0 x64 Setup.exe开始安装,勾选我接受协议,点击next

3、点击浏览选择软件安装路径,点击next

4、
选择您希望安装程序在安装CosiMate时执行的其他任务,点击next

5、确认安装信息并点击install安装

6、软件安装中,大家耐心等待

7、安装完成,点击finish退出向导

8、不要运行软件,将_SolidSQUAD_破解文件夹中CosiMate程序文件夹复制到软件安装目录中,在默认设置下为C:\ ChiasTek \ CosiMate)点击替换目标中的文件

9、首次启动程序时,要求输入许可证输入完整路径,包括许可证文件cosimate_SSQ.dat(默认设置为C:\ ChiasTek \ CosiMate \ cosimate_SSQ.dat)(输入访问正确许可证文件的路径:警告:路径信息将保存在您的个人配置文件中。
对于多用户设置,请单击“取消”并设置COSIMATE_LICENSE FILE环境变量。)

软件特色
1、异构模型:电气,机械,电子,液压,算法,状态图表等......
2、硬件/软件协同验证,硬件在环测试。
3、跨职能领域和整个组织的模拟。
4、在单个协同仿真项目中支持多种模拟器/语言,独特模拟器中的多个求解器,多个抽象级别,各种数据类型连接。
5、仿真动态的灵活性:支持多个通信采样时间(时间步长)和多个启动时间。
6、支持基于HDL和UML的模拟器的纯事件驱动协同仿真。
7、事件驱动通信的灵活性:中断驱动,忙等待轮询,缓冲......
8、支持求解器(例如,Simulink)和事件驱动(HDL,UML)或顺序(C)模拟器之间的异构协同仿真。
9、使用图形编辑器轻松模拟器连接,以构建协同仿真网表。
10、轻松设置远程访问和多平台协同仿真。
11、轻松模拟器管理和定制模拟器设置。
12、通过使用I / O的标准XML描述来轻松进行框架集成。
13、集成的调试和监控功能(间谍数据,VCD和Excel跟踪,协同仿真控制)。
14、大量仿真类型(例如,连续或离散仿真)和数据类型(例如,标量,逻辑,向量或总线)。
15、LAN和WAN协同仿真。
16、MPI协同仿真
软件功能
1、开放式架构
CosiMate的开放式架构使工程师能够将无限数量的仿真环境连接在一起。一旦启动了协同仿真过程,用户就可以透明地与本机模拟器进行交互,就好像CosiMate不存在一样。
代表不同抽象级别的模型可以混合和匹配,提供高度的灵活性。此外,由于各个工程师可以在熟悉的环境中工作,因此可确保整体系统质量。
2、测试环境
通过集成C / C ++调试器或监视器以及LabVIEW和LabWindows / CVI等测试和测量工具,CosiMate可用作测试环境。还可以支持CarSim等专用工具,它可以模拟和动画汽车和卡车的动态测试。
CosiMate提供了一组实用工具,例如自动工作台生成器,以便于模型或代码的开发,而无需共同模拟整个系统。生成的C代码允许通过使用协同仿真技术来简单地测试系统的一部分。
3、验证平台
CosiMate能够在不同的抽象层次上共同模拟模型。此功能提供了一个完整的环境,用于验证模型功能在设计流程中的非回归。
Chiastek与我们的OEM客户合作,证明了使用CosiMate进行软件在环(SIL)验证的概念。 我们的客户创建了一个完整的框架,用于针对PC上的各种工厂模型测试生产控制软 重点主要是软件通信(直接I / O,CAN,...),软件初始化(校准),系统同步(任务调度)。
4、网络化架构
CosiMate 的网络架构非常适合多学科开发团队的概念。由于其网络特性,CosiMate还支持在多任务模式下研究系统行为,方法是对模型进行分区,并将各个部分的模拟分布在多个不同的机器上。在许多客户基准测试中,该技术有助于显着提高仿真速度。
5、性能影响
CosiMate技术提供了一种解决方案,可以克服模拟集成的大规模动态系统的难题。在实际的大型Simulink模型上测量到2到11的潜在加速。通过传统的分区技术(将全阶模型分成几个较小的部分)并在单台或多台计算机上进行模拟,可以显着缩短仿真时间。
6、与CosiMate互动
用户使用图形拖放界面配置协同仿真会话,并且必须定义以下参数集:仿真器列表(类型,网络地址等),仿真器之间的连接类型以及仿真启动模式。数据管理器控制整个协同仿真过程中不同环境之间的数据同步。内部示波器也可用于跟踪协同仿真总线上的活动。
7、与本机模拟器交互
CosiMate的一个重要功能是与用户首选模拟器交互的简便方法。除了用于控制协同仿真的默认CosiMate用户界面外,CosiMate还允许在本机仿真环境中执行。因此,CosiMate用户可以轻松地在他们熟悉的环境中控制,调试和监控模拟,就好像他们以独立模式运行一样。
8、连接新的模拟器
接口开发包是一组工具,资源和文档,便于将新模拟器集成到CosiMate框架中。新的接口代码是在Eclipse CDT环境中开发和编译的。最终用户通过在Eclipse环境中使用图形XML编辑功能来管理CosiMate库的组件。CosimMate API文档可用并集成在Eclipse IDE中。
除了创建新界面外,用户还可以自定义Simulink和Saber等模拟器的接口,这些模拟器目前支持标准的CosiMate产品。
9、功能模拟接口(FMI)
FMI定义了一个开放接口,用于在各种模拟环境之间交换模型(模型交换的FMI),或者将模型共同模拟在一起(用于协同仿真的FMI)。
与CosiMate平台完成的集成允许FMI和非FMI模型之间的协同仿真,如Simulink®,Saber®或其他类型的仿真器。此外,CosiMate环境足够强大且灵活,可以实现FMI之间的协同仿真,用于协同仿真和FMI用于模型交换模型。
支持的模拟器和语言接口
模拟器:
MathWorks:Matlab®/Simulink®
IBM Rational:Statemate®,Rhapsody®
Synopsys:Saber®,SaberRD®,Saber®HDL,Virtualizer
MSC软件:Easy5®,Adams®
Autodesk:Inventor®
LMS国际公司:Imagine.LabAMESim®,Virtual.Lab ® 运动
Powersys:EMTP-RV®
Powersim:PSIM®
Gamma Technologies:GT-Suite®
Mentor Graphics:Modelsim®
施泰尔工程中心:Kuli®
DassaultSystèmes:Dymola®
OpenModelica®
机械仿真:CarSim ®
西门子:NX I-deas TMG
ANSYS机械
语言:
FMI
Modelica的
C,C ++
Java的
VHDL,VHDL-AMS
注意:其他语言可以轻松封装在C包装器中。
使用帮助
协同仿真概述
1.在开始协同仿真之前,请检查CosiMate软件是否已正确安装以及您的环境是否已正确设置。所有必需的程序都在CosiMate用户手册中描述。特别是,检查:模拟器环境变量(检查耦合注释),特定的远程过程(请参阅CosiMate用户手册的远程Windows PC配置部分)。如果您有任何问题,请联系支持部门:support @。 cosimate。 COM。
2.第一步是根据协同仿真环境创建新模型或划分现有模型。检查所有模型的依赖关系,模拟模式......
3.使用模拟器环境中提供的CosiMate组件,自定义模型以在CosiMate环境中运行。此步骤使得能够与协同仿真总线上的其他模型进行通信。
4.创建网表(或配置文件),用于描述模拟器实例之间的所有连接,从而描述描述整个应用程序的所有模型(Matlab和Saber)之间(在我们的例子中,它将是暂停示例) 。
5.开始协同仿真。
将使用图形用户界面执行步骤4和5。步骤2和3特定于模拟环境:Matlab / Simulink或Saber。
注意:此协同仿真是定时的,并且必须设置时间步长以确定通信采样步骤。
机械悬架的例子
该应用基于由PID控制的机械悬架(参见图1)
关于设计,我们注意到两个不同的部分:机械部件(悬架本身)和控制部件(PID)。
因此,我们可以轻松地将此模型划分为两个子模型。 机械部件将在Saber中设计和模拟,控制部件在Matlab / Simulink中。
模型之间的相互作用将由两个信号执行:第一个实现力Fc,第二个实现相对位置(车身位置 - 车轮/车轴位置)。
确定了分区后,我们可以在协同仿真环境中开始模型定制。
模型定制:
对于每个模拟器,每个模型的定制分两步执行:
1.在模型中创建CosiMate端口:每个模拟器的操作都不同:Saber和Matlab / Simulink。
2.构建每个模型的接口XML描述(IXD文件),以便快速设置也称为网表的协同仿真平台(参见网表创建)。
每个模型的这两个步骤(PIDmatlab(Simulink)和SUSPsaber(Saber))描述如下:
Matlab / Simulink模型:
模型定制
1.复制目录%COSIMATE DIR%lexamples lSaber-中的完整示例
SimulinkSuspension到用户目录(您选择的)。 您将命名此新目录<cosim example directory>。
2.打开Matlab会话。 在Matlab环境中打开模型。 在我们的示例中,打开以下文件夹中可用的PID模型:<cosim example directory> \ PIDmatlab。 模型文件的名称是:PIDmatlab。MDL。
笔记:
o我们的示例已经过定制,可与CosiMate一起使用。 删除模型中的CosiMate组件(如果您愿意,首先制作副本):exin_disc和exout_disc组件。

3.打开Simulink组件的库浏览器。选择CosiMate 1 / O端口库。打开它。

4.展开文件夹Discrete Data Ports
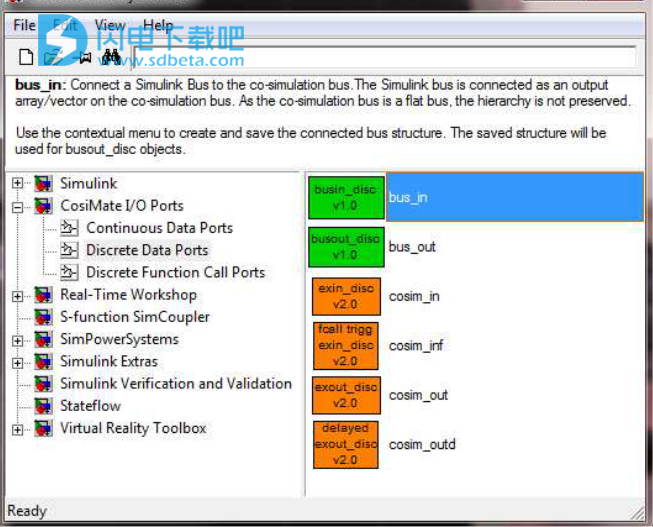
5.将所有必要的组件拖放到模型中。 有关CosiMate 1 / O端口块集的更多信息,请参阅CosiMate用户手册部分Matlab / Simulink模型。 在我们的示例中,添加一个exin_disc(cosim_in)和一个exout_disc(cosim_out)组件(离散端口)。
6.将它们连接到模型的每个输入和输出。 在我们的示例中,将exin光盘组件连接到滤镜输入。 将exout光盘组件连接到PID输出。

7.重命名每个CosiMate I / O端口(exins和exouts)。 名称是用户可定义的,并且重要的是所选名称将用于CosiMate网表描述中。 在我们的示例中,为每个端口选择一个名称。
例如:exin光盘(cosim in)端口的位置,以及exout光盘(cosim out)端口的强制。

8.允许每个I / O端口的参数化:o对于CosiMate输入端口(exins):双击组件将显示以下对话框:
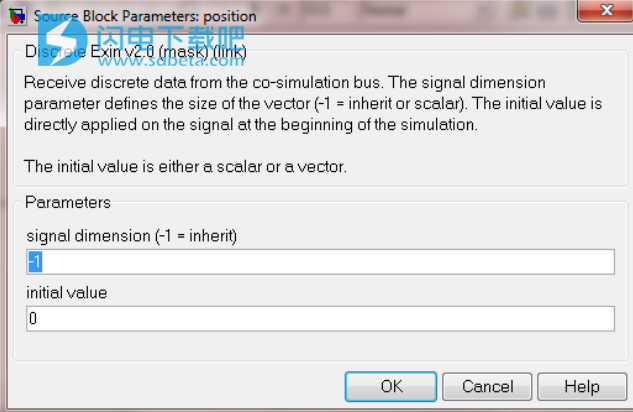
参数化包括设置两个参数:
。 信号维度:确定端口是否为向量(值= [1..n],其中n> = 1),标量类型(值= 1)或继承值(值= -1)。 默认情况下,该值等于-1。
·初始值:设置在模拟的初始化阶段加载的exin组件输出的初始值。 默认情况下,该值等于0。
o对于CosiMate输出端口(exouts):双击组件将显示以下对话框:
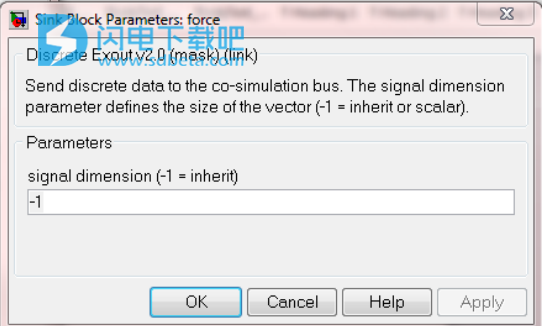
参数化包括设置以下参数:
·信号维度:确定端口是否为向量(值= [1..n],其中n> = 1),标量类型(值= 0)或继承值(值= -1)。 默认情况下,该值等于-1。
9.通过打开“配置参数”对话框,根据模型的要求设置模拟参数
(模拟菜单)。 特别重要的是模拟步长,模拟开始时间和模拟停止时间。 在我们的示例中,我们定义选择大约10秒的停止时间和大约最大步长
0.01。

注意:如果CosiMate与CosiMate环境中固定的结束时间不同,则不会更改模拟时间。 结果检查结束时间是否合适。
更新日志
2017年7月:
相关的V9.0版本,其主要变化是Linux版本的创建











