LS-DYNA 11破解版是一款功能强大的有限元分析模拟软件,LS-DYNA是一种通用有限元代码,用于分析结构的大变形静态和动态响应,包括与流体耦合的结构。主要解决方案方法基于显式时间集成。目前可提供隐式求解器,其功能有限,包括结构分析和热传递。接触碰撞算法允许通过接触界面上包括的热传递容易地处理难以接触的问题。通过该算法的专门化,这些接口可以严格地与允许变量分区相关联,而不需要网格过渡区域。其他特殊功能,只需在拉延筋上定义一系列节点,即可轻松建模金属冲压应用中的拉珠。通过使用四个节点四面体和八个节点实体单元,两个节点梁单元,三个和四个节点壳单元,八个节点固体壳单元,桁架单元,膜元件,离散元件和刚体来实现空间离散化。元素配方可用于每种元素类型。安全气囊,传感器和安全带的专业功能为汽车行业的应用量身定制了LS-DYNA。自适应重新网格化可用于外壳元件,并广泛用于钣金冲压应用。 LS-DYNA目前包含大约一百个本构模型和十个状态方程,以涵盖广泛的材料行为。使用为用户提供了完善的工具和功能来帮助大家进行复杂的模拟操作,它为瞬态问题提供高度可扩展的解决方案,拥有隐式和显式的尖端技术,可用于精确解决复杂过程。LS-DYNA的MPP功能为集群提供了可扩展性,可实现快速周转。LS-DYNA为超音速冲击波捕获和FSI提供了高度精确的可压缩CFD求解器。强大的电磁解算器使用能够将电磁场耦合到机械,热和流体求解器。LS-DYNA带来了全新的不可压缩的CFD求解器,用于强流体、结构耦合、共轭传热和湍流。软件使用旨在为汽车,航空航天,建筑,军事,制造和生物工程行业带来强大的助力,本次小编带来最新破解版,含破解文件和安装破解教程,有需要的朋友不要错过了!
安装破解教程
1、在本站下载并解压,得到lsdyna_R11_0_winx64-install.exe安装程序和crack破解文件夹
2、双击lsdyna_R11_0_winx64-install.exe运行,勾选我接受许可证协议条款
3、选择软件安装路径
4、安装完成,去勾选启动软件选项,点击finish退出向导
5、打开crack破解文件夹,将
“ls-dyna_smp_d_R11_0_winx64_ifort131.exe”,“ls-dyna_smp_s_R11_0_winx64_ifort131.exe”和“lstc_file”复制到软件安装目录中的program文件夹内,例如(E:\LSDYNA\program)

6、然后我们运行LS-DINA Program Manager 许可证管理器, 如图所示,依次选择 Env Variables > Set LS-DYNA ENV, Variables >
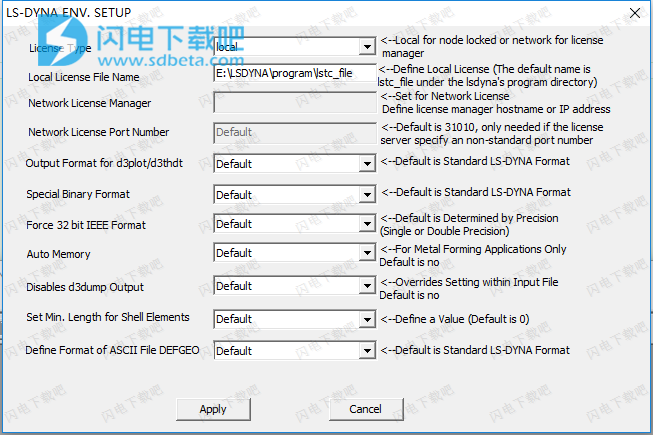
7、 License Type许可证类型,选择local本地,Local License File Name中填写lstc_file的完整路径(例如默认路径的话,填写 C:\LSDYNA\program\lstc_file )点击apply应用
功能特色
一、LS-DYNA的分析功能包括:
完整的2D和3D功能
非线性动力学
刚体动力学
准静态模拟
正常模式
线性静力学
热分析
流体分析
欧拉能力
ALE(任意拉格朗日 - 欧拉)
FSI(流体 - 结构相互作用)
Navier-Stokes液体
可压缩流体求解器,CESE(保护元素和解决方案元素)
FEM-rigid多体动力学耦合(MADYMO,Cal3D)
水下冲击
故障分析
裂纹扩展
实时声学
隐含的回弹
多物理耦合
结构 - 热耦合
自适应重新网格化
SPH(平滑粒子流体动力学)
EFG(Element Free Galerkin)
辐射运输
EM(电磁学)
二、材料库
LS-DYNA的材料库包括:
金属
塑料
玻璃
泡沫
面料
弹性体
蜂窝
混凝土和土壤
粘性流体
用户定义的材料
三、元素库
LS-DYNA的元素库包括:
梁(标准,桁架,离散,电缆和焊缝)(超过10个梁元件配方)
离散元件(弹簧和阻尼器)
集中的惯性
集中的群众
加速度计
传感器
安全带
预紧
拉钩
滑环
壳(3,4,6和8节点,包括3D壳,膜,2D平面应力,平面应变和轴对称固体)(超过25个壳单元配方)
固体(4节点和10节点四面体,6节点五面体和8节点六面体)(含有20多种固体元素配方)
SPH元素
厚壳(8节点)
四、联系算法
LS-DYNA的联系算法包括:
灵活的身体接触
灵活的身体与刚体接触
刚体与刚体接触
边对边接触
侵蚀联系
捆绑表面
CAD表面
刚性的墙壁
画珠子
应用范围
1、航天
LS-DYNA被航空航天工业广泛用于模拟鸟击,喷气发动机叶片遏制和结构失效。
航空航天应用包括:
刀片遏制
鸟击(挡风玻璃和发动机叶片)
故障分析
2、汽车耐撞性和乘员安全
LS-DYNA被汽车工业广泛用于分析车辆设计。LS-DYNA准确地预测了汽车在碰撞中的行为以及碰撞对汽车乘员的影响。通过LS-DYNA,汽车公司及其供应商可以测试汽车设计,而无需工具或实验测试原型,从而节省时间和费用。
专业汽车功能包括:
安全带
滑环
预紧
拉钩
传感器
加速度计
安全气囊
Hybrid III虚拟模型
充气机型号
3、地震工程 - 土 - 结构相互作用
混凝土坝,核电站,高层建筑和桥梁等大型土木结构足够大,以至于地震激发引起的振动会影响土壤或支撑它们的岩石的运动,从而进一步影响结构本身的运动。 。结构和土壤之间的这种相互作用需要精确建模,以便设计抗震结构并正确评估现有结构的地震安全性。有关详细信息(请单击此处)。
4、金属成型
LS-DYNA最广泛使用的应用之一是钣金成型。LS-DYNA准确地预测金属经受的应力和变形,并确定金属是否会失效。LS-DYNA支持自适应重新网格化,并在分析过程中根据需要细化网格,以提高准确性并节省时间。
金属成型应用包括:
金属冲压
液压成形
锻造
深拉伸
多阶段流程
5、多物理场
LS-DYNA R7追求解决耦合多物理场问题的目标,包括三个新的求解器:
不可压缩的CFD
电磁
CESE /可压缩CFD和化学
从而开辟了广泛的新应用。为了更多信息和访问文档(点击这里)。
6、其他
其他应用包括:
跌落测试
可以和运输容器设计
电子元件设计
玻璃成型
塑料,模具和吹塑成型
生物力学(心脏瓣膜)
金属切削
故障分析
运动器材(高尔夫球杆,高尔夫球,棒球棒,头盔)
土木工程(海上平台,路面设计)
使用帮助
Belytschko梁
Belytschko梁单元公式[Belytschko等人1977]是Belytschko和其他研究人员的结构有限元系列的一部分。
共同旋转技术
在用于处理大旋转的元件配方中。 本节讨论了共旋转配方,因为配方最容易描述为梁单元,然后描述用于配制共旋转梁单元的梁理论.6.1共旋转技术在任何大位移公式中,目标是 将变形位移与刚体位移分开,因为只有变形位移引起应变和相关的应变能量产生。 这种分离通常通过将当前配置与参考配置进行比较来完成。
当前配置是变形体在其当前空间位置和方向上的完整描述,给出包括身体的所有点(节点)的位置。 参考配置可以是主体的初始配置,即零时的节点位置,或者某个其他状态(时间)的主体配置。 通常,参考配置被选择为先前的配置,例如在timet“= tu + 1-At。
参考配置的选择决定了将要计算的变形类型:通过将当前配置与初始配置进行比较得到总变形,而通过与先前配置进行比较得到增量变形。 在大多数时间步进(数值)拉格朗日公式中,使用增量变形是因为它们导致其他算法(主要是本构模型)的显着简化。
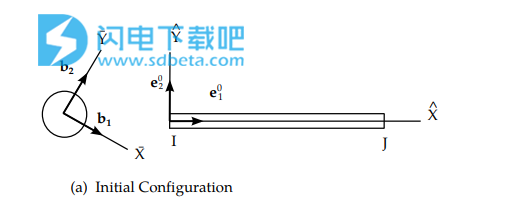
图6.1。同向旋转坐标系:(a)初始配置,(b)刚性旋转配置和(c)变形配置。
将当前配置与参考配置直接比较不会导致确定变形,而是提供总(或增量)位移。我们将使用不合格的术语位移来计算总位移或增量位移,具体取决于参考配置作为初始状态或最后状态的选择。如果参考配置是初始配置,这可能是最明显的。当前配置与参考配置的直接比较产生位移,其包含由于变形和刚体运动引起的分量。任务仍然是分离变形和刚体位移。通常通过从位移中减去刚性体位移的估计来发现变形。精确的刚体位移通常仅在琐碎的情况下已知,其中它们作为位移场的一部分被先验地规定。共旋转配方提供了刚性体位移的一种这样的估计。
共旋转公式使用两种类型的坐标系:一个与每个元素相关联的系统,即,与元素一起变形的元素坐标,以及与每个节点相关联的另一个,即嵌入在节点中的体坐标。
(术语“体”用于避免将这些坐标称为'节点'坐标时可能出现的混淆。另外,在[Belytschko等,1977]中提出的更一般的公式中,节点可以选择性地附着在刚体上因此,术语“身体坐标”指的是刚体中的坐标系,其中一个节点是特殊情况。)这两个坐标系显示在图的上部。
元素坐标系被定义为具有源自节点I并终止于节点J的局部x轴x; 局部的y轴y和三维的局部y-
轴z,正常构造。 元素坐标系(x,y,z)和相关的单位向量三元组(e1,e2,ea)在每个时间步骤通过用于构造初始系统的相同技术更新; 因此单位矢量e随元素变形,因为它总是从节点I指向nodeJ。
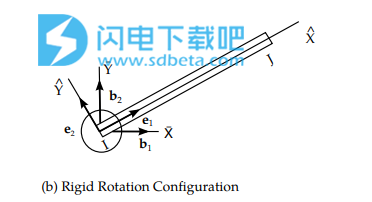
图6.2。同向旋转坐标系:(a)初始配置,(b)刚性旋转配置和(c)变形配置。
嵌入式车身坐标系最初沿主惯性轴定向;组合的节点质量或相关的刚体惯性张量用于确定惯性主值和方向。尽管体轴的初始取向是任意的,但主惯性坐标系的选择简化了运动的旋转方程,即,在旋转运动方程中不存在惯性叉积项。因为身体坐标固定在节点或刚体中,所以它们随节点旋转和平移,并且通过积分运动的旋转方程来更新,如随后将描述的。
两个坐标系的单位矢量定义全局坐标系和每个相应坐标系之间的旋转变换。这些变换对具有全局分量A =(Ax,A,Az),体坐标分量A =(A.,A ,, A。)和元素坐标分量A =的矢量进行操作。
(A,A,A)定义为:

其中bir,bn,be是身体坐标单位向量的全局成分。
类似地,对于元素坐标系:

其中ei,ev,ez是元素坐标单位矢量的全局分量。 逆变换由矩阵转置定义,即,

图6.3。同向旋转坐标系:(a)初始配置,(b)刚性旋转配置和(c)变形配置。
因为这些是适当的旋转变换。
以下两个示例说明了元素和主体坐标系如何用于将变形和刚体位移与位移分开:刚性旋转。首先,考虑梁元件绕节点I的刚体旋转,如图6.2的中心所示,即,将节点I视为钉扎连接。
因为在刚性旋转期间光束不变形,所以初始和旋转配置中的单位矢量e1的方向将相对于身体坐标相同。如果存储了初始元素单位向量ef的体坐标分量,则它们将与当前元素单位向量e1的体坐标分量相同。
变形轮换。接下来,考虑节点I被限制旋转,即,aclamped连接。现在移动节点J,如图6.3的下部所示,导致梁元件变形。构造更新的元素单元矢量e1,并将其体坐标分量与原始元素单元矢量e9的体坐标分量进行比较。因为体坐标系没有旋转,所以当节点I受到约束时,原始元素单位向量和当前元素单位向量不是共线的。实际上,这两个单位矢量之间的角度是节点I处的旋转变形量,即,

因此,共旋转配方通过使用以下方式分离变形和刚体变形:
·与元素一致变形的坐标系,即元素坐标;
·或与节点刚性旋转的坐标系,即身体坐标;
然后,使用刚性旋转的主体坐标系,将元素坐标系的当前方向与初始元素坐标系进行比较,以确定变形。










