通过与Revit和Tekla Structures,Open BIM的IFC或第三方插件的强大双向链接,与其他项目利益相关者无缝交换模型。
使用帮助
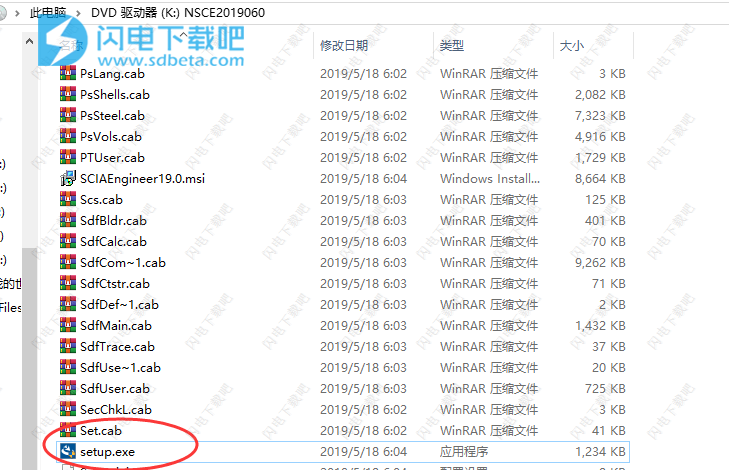
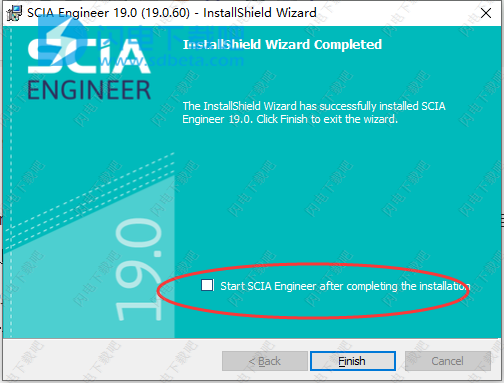
一、启动程序
根据您的个人习惯,选择以下方法之一:
1、桌面上的捷径
如果在安装过程中自动将快捷方式放在桌面上,请继续执行步骤3。
将快捷方式放在桌面上。
在桌面上单击鼠标右键。
选择“新建”>“快捷方式”命令。
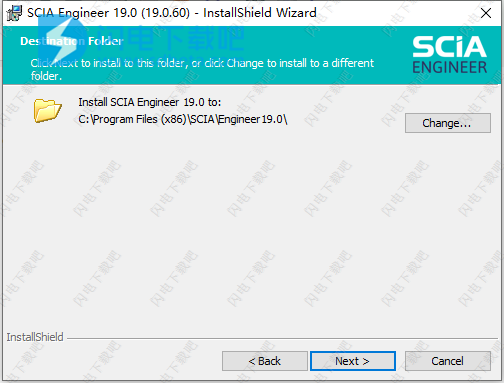
浏览硬盘以找到已安装SCIA Engineer的文件夹。
选择ESA.EXE并完成New Short-cut命令。
双击快捷方式启动程序。
2、开始菜单
单击Windows状态栏左侧的“开始”按钮。
选择(所有)程序> SCIA Engineer XXXX.X> SCIA Engineer XXXX.X.
3、Windows资源管理器或其他文件管理器
浏览硬盘以找到已安装SCIA Engineer的文件夹。
选择ESA.EXE文件并双击它以启动该程序。
二、项目经理对话
项目经理对话是一种帮助用户打开,创建或浏览项目的工具。它允许调整保护设置,使用链接和其他选项来管理SCIA工程师或查找有关它的更多信息。
所有这些功能都存储在一个对话中。
1、项目信息预览
对话的最大优点是项目信息预览。每个项目都有一个结构图片和基本信息,如姓名,作者,成员数量,计算结果......
顶部的“播放”按钮打开所选项目;
预览显示项目中图像的幻灯片放映,可以按箭头列出;
该表包含有关项目数据,结构和计算的标准信息;
项目经理对话出现时?
当用户单击基本应用程序工具栏上的“启动项目管理器”图标时,将显示对话框。
2、创建一个新项目
可以创建一个新项目
单击[空白项目]:在SCIA工程师中创建一个新的空项目;
用户可以完全自由地定义项目的配置
从[模板]部分选择模板项目
3、最近的项目
用户可以从他过去最近工作的项目中选择并打开一个。这些项目的列表与SCIA Engineer主菜单中的相同。只需双击即可打开项目。
最近项目列表在SCIA工程师重启后更新。
4、浏览
此按钮启动系统打开文件对话框,可以选择任何想要的SCIA Engineer项目文件。
支持所有标准功能(复制,粘贴,新文件夹等)。
5、教程
[教程]部分提供了一系列教程和示例项目。
对于每个教程项目,都提供了逐步的PDF文档(项目信息预览顶部的文档链接)。
学习中心和其他文档
除教程外,还提供了几个文档链接。
学习中心:为初次使用者提供直接访问快速入门培训视频和文档
资源中心:关于SCIA工程师的一般文档(情况说明书,技术文章等......)
SCIA网站:SCIA主页
Web帮助:SCIA工程师的一般在线帮助
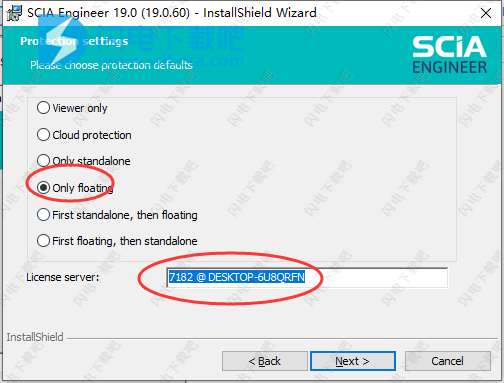
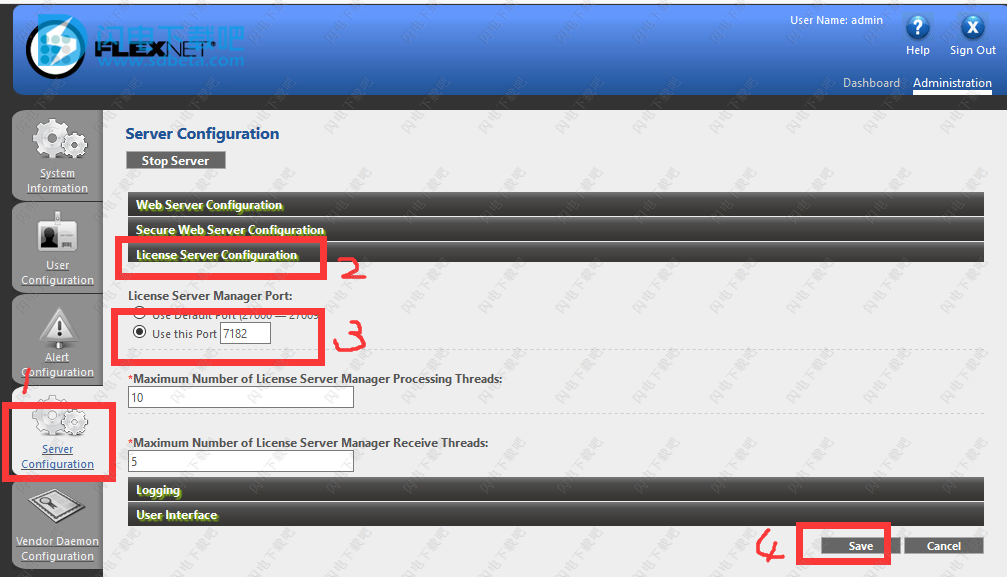
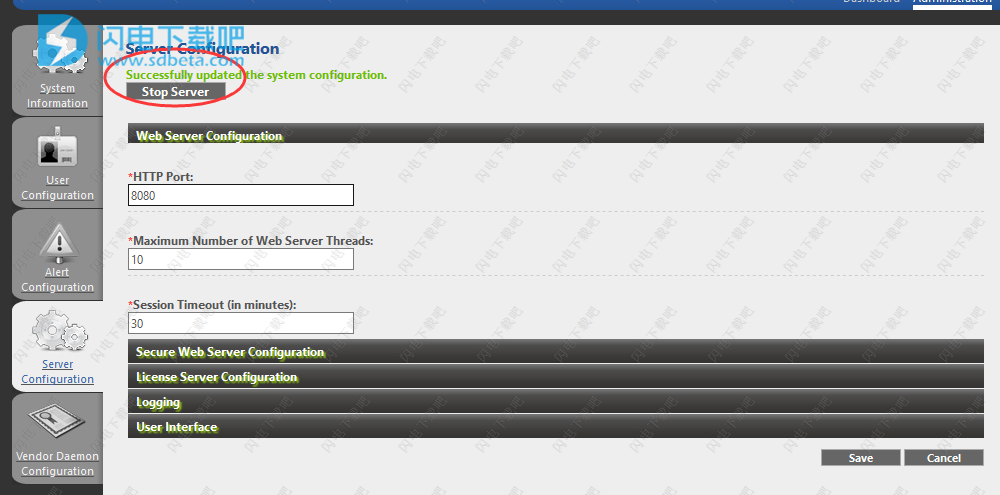
启动项目对话框中的保护设置
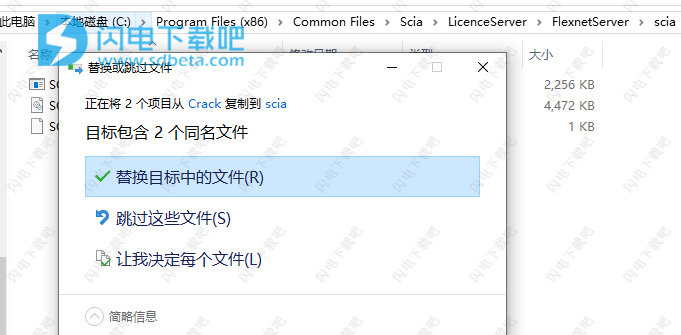
可以使用按钮保护设置启动保护设置对话框。在一小段延迟后,可以遵守保护设置中所做的更改。如果SCIA工程师正在运行,则在重新启动应用程序后将应用保护设置中所做的任何更改。
如果缺少许可证,保护设置按钮将变为闪烁和红色。
6、搜索项目列表并对其进行排序
可用于上述选项卡的项目列表具有共同的行为
搜索
可以使用“搜索”字段对其进行过滤。
分类
可以根据列之一对列表进行排序。通过单击列标题切换排序。它依次遵循三个可能的值(无,升序,降序)。
如果在SCIA工程师的启动动作设置中选择了“打开最后一个项目”,则跳过项目经理对话。
三、SCIA工程师64位主要方法和概述
SCIA工程师(版本v17.1)提供了在两个版本(32位和64位)之间进行选择的可能性,用于显示结果和执行设计。
1、建模的主要方法 - 计算 - 64位检查
64位版本尚未包含32位版本中可用的所有功能,因为并非所有这些功能都是64位兼容的。 64位的主要方法是允许用户输入(几乎)所有内容(即使它不受支持)。如果项目中使用了不受支持的分析类型,则在计算开始之前将显示错误消息。例如,当使用当前不支持的“塑料铰链”时,您将在计算开始之前收到以下错误消息:
如果结果或检查不受支持,它将隐藏在SCIA工程师中。在这些情况下,用户可以继续在32位版本的SCIA工程师(使用V16 PPE)中工作。如果工程报告,图片库或表格结果中已存在不受支持的检查/结果项目,则用户将看到以下消息:不支持的任务。请切换到PPE v16(32位版本)。
备注:PPE是术语后处理环境的缩写
四、协调系统简介
作为SCIA工程师的用户,您将遇到一系列各种协调系统。一些协调系统对于程序本身的工作至关重要,其他一些系统可能会显着减少获得所需结果所需的工作量和时间。
根据与以下内容相关的内容,协调系统可分为若干组:
·全球统筹系统
基本的坐标系统,提供模型的定位和定向及其明确的定义
·用户定义的坐标系统
·UCS
为了促进模型定义,用户可以定义它的起源和方向
点定义坐标系;
·几何定义坐标系
以最直接的方式提供几何的定义
·实体协调系统
·当地的协调系统
定义模型中各个实体的方向,并提供与实体相关的物理量的明确解释
五、全球统筹系统
该计划中使用的全球统筹系统是一个三维右笛卡尔坐标系统。
系统的轴标记为X,Y和Z.
注意:强烈建议将创建的结构模型定位在接近全局坐标系原点的位置(即靠近全局坐标为0,0,0的点),以防止可能的数值误差 对数字操作进行过多的数字操作。
进一步建议关注这一点,尤其是在从第三方CAD程序导入模型几何体之后
六、用户定义的坐标系统
为了简化和加速模型的工作,用户可以定义自己的坐标系统或系统,并在全局坐标系统的任何位置定位它们的起源,包括可能的倾向。
用户定义的坐标系统是一个三维右手笛卡尔坐标系统。
系统的轴标记为X,Y和Z.
用户坐标系统可以任意设置,并且可以在工作期间根据需要多次改变设置。 此外,可以同时定义任意数量的用户坐标系统,但是其中只有一个可以一次处于活动状态。 只要看起来方便,用户就可以在先前和新定义的用户坐标系统之间进行交换。
有关设置和使用用户坐标系统的信息,请参阅基本工作工具>用户坐标系统一章。