Jack v9.0ЦЦНтАцЪЧвЛИіЭъећЕФЯЕЭГЃЌгУгкЩњГЩ3DЛЗОГЛђ“ащФтЪРНч”ЃЌВЂдкЧПДѓЕФЭМаЮЛЗОГжагыЫќУЧНјааНЛЛЅЁЃАќРЈаэЖрЧПДѓЕФдіЧПЙІФмЁЃЮЊСЫАяжњМгПьзЫЪЦЃЌШЋЩэКЭЫЋЪжЕФзЫЪЦПтвбОИќаТЃЌгыЕфаЭЕФзјзЫКЭеОСЂЦРЙРИќЯрЙиЁЃв§ШыСЫаТЕФФЌШЯv9.0ЭМаЮБфЬхвдЪЕЯжШЋЩэзЫЪЦЁЃШЮЮёФЃФтЩњГЩЦїЃЈTSBЃЉЯЕЭГвбЭЈЙ§аТЕФСІЧњЯпЧѓНтЦїЕУЕНдіЧПЃЌИУЧѓНтЦїдЪаэФЃФтСІДѓаЁЫцЪБМфБфЛЏЕФЪЉМгШЮЮёЁЃЧПжЦХфжУЮФМўПЩвдЪжЖЏЖЈвхЃЌвВПЩвдЭЈЙ§ЮФМўЖСШЁЁЃШЮЮёЗжЮіЙЄОпАќЃЈTATЃЉвбОРЉеЙСЫаТЕФЪжБлСІСПЦРЙРЙЄОпЁЃЛљгкLaDelfaКЭPotvinЃЈ2017ЃЉЕФЙЄзїЃЌаТЕФСІСПФЃаЭећЬхЗжЮіСЫдЫЖЏЧщПіЃЌвдЦРЙРЪжБлСІСПФмСІЁЃЭЌбљдк9.0АцБОжаЃЌПЩвдЪЙгУздЖЏБЃДцЛњжЦЁЃИљОнПЭЛЇПЊЗЂЕФЙІФмЃЌЯждкПЩвдбЁдёЦєгУвддЄЖЈМфИєздЖЏБИЗнЛЗОГЃЈ.envЃЉЮФМўЁЃЖдгкMotion CaptureЙІФмЕФгУЛЇЃЌ9.0АцжаЬсЙЉСЫМИЯюживЊЕФдіЧПЙІФмЁЃШЋЩэздЖЏЫѕЗХвбОжиаТЪЕЯжЃЌдЪаэИќКУЕиЪзДЮНЋНмПЫЭМЫѕЗХЕНЪ§ОнЃЌВЂЧвЯждкПЩвдЬсЙЉИќЙуЗКЕФШЫЬхВтСПГпДчСаБэвдНјвЛВНИФЩЦжїЬхКЭНмПЫЛЏЩэжЎМфЕФЦЅХфЁЃЭЈЙ§аоИФЕФНчУцЛњжЦвВПЩвдИќКУЕижЇГжЪжЪЦИњзйЦїЁЃдіМгСЫЖдNoitomЃЈPerception NeuronЃЉИњзйЦїЕФжЇГжЁЃJack 9.0АВзАГЬађжаАќКЌ9.0АцБОЕФOccupant Packaging ToolkitЃЈOPTЃЉЁЂ9.0ЕФАцБОШЮЮёЗжЮіЙЄОпАќЃЈTATЃЉвдМАЪЪгУгк9.0АцЕФMotion Capture ToolkitЃЌБОДЮДјРДЦЦНтАцЯТдиЃЌКЌЦЦНтЮФМўЃЌгаашвЊЕФХѓгбВЛвЊДэЙ§СЫЃЁ
АВзАЦЦНтНЬГЬ
1ЁЂдкБОеОЯТдиВЂНтбЙЃЌШчЭМЫљЪОЃЌЕУЕНjack90-win64-inst.exeАВзАГЬађКЭcrackЦЦНтЮФМўМа
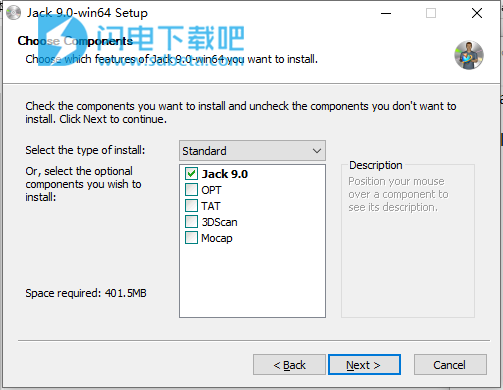
2ЁЂЫЋЛїjack90-win64-inst.exeдЫааЃЌЙДбЁЮвНгЪмаэПЩжЄавщЃЌЕуЛїnext
3ЁЂбЁдёШэМўАВзАТЗОЖЃЌЕуЛїnext

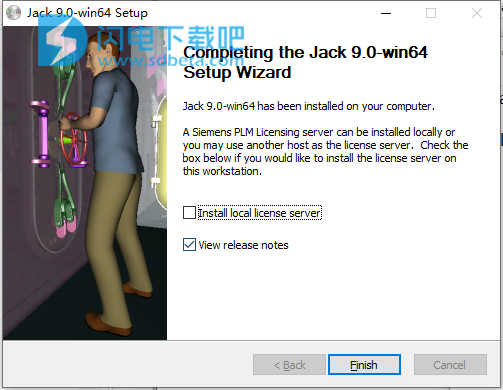
4ЁЂАВзАЭъГЩЃЌЕуЛїfinish
5ЁЂНЋcrackжаЕФJack_9.0ИДжЦЕНАВзАФПТМжаЃЌЕуЛїЬцЛЛФПБъжаЕФЮФМў
Jack 9.0аТЙІФм
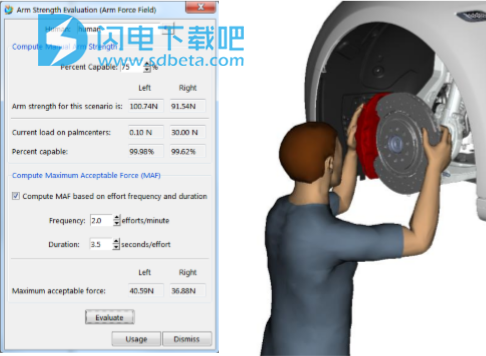
1ЁЂЪжБлСІСПЦРЙРЃЈArm Force FieldЃЉ
СІСПФмСІЦРЙРЪЧШЋУцШЫЬхЙЄГЬбЇЦРЙРЕФКЫаФзщГЩВПЗжЃЌгажњгкЪЖБ№МЁШтЙЧїРЙ§ЖШЫ№ЩЫЗчЯеЃЌВЂЬсЙЉгаЙизАХфСІЯожЦЕШжИЕМЕФжИЕМЁЃ Jack 9.0в§ШыСЫвЛжжаТЕФЪжБлСІСПЦРЙРЙЄОпЃЌИУЙЄОпЛљгкLaDelfaКЭPotvinЃЈ2017ЃЉЕФбаОПЃЌЮЊСІСПЯрЙиЦРЙРЬсЙЉЖюЭтЕФМћНтЁЃгыЛљгкЙТСЂМЁШКЧПЖШЕФФЃаЭЯрБШЃЌArm Force FieldЗНЗЈдкећЬхЩЯЦРЙРЙІФмЯћКФЃЌПМТЧЪжВПЮЛжУЃЌСІЗНЯђЃЌШЫЬхВтСПбЇКЭжиСІЁЃдкФЃаЭПЊЗЂжаПМТЧСЫдкжЦдьжаЙлВьЕНЕФЕфаЭеОСЂСІЕФЪЕбщЪвбаОПЁЃОпЬхРДЫЕЃЌИУЙЄОпдЪаэФњЃК
МЦЫуШЮКЮЗНЯђЕФзюДѓЪжВПдЫЖЏФмСІМЦЫуЬиЖЈдЫЖЏЧщОАЕФШЫПкАйЗжБШМЦЫузюДѓФмСІЪБЃЌПЩбЁдёПМТЧдЫЖЏЦЕТЪКЭГжајЪБМф
зЂвтЃК
ЪжБлЧПЖШЦРЙРФЃаЭЪЧзїЮЊExcelКъЪЕЯжЕФЃЌашвЊЗУЮЪMicrosoft ExcelАВзАВХФмжДааЁЃ
ЮФЕЕжаЬсЙЉСЫБГОАВЮПМКЭФЃаЭЪЙгУЫЕУїЁЃ
2ЁЂИќаТСЫШЋЩэКЭЪжЪЦЭМЪщЙн
ЮЊСЫМгПьЭМаЮЕФзЫЪЦвдБуНјааЗжЮіЃЌЭЈГЃвдНгНќЦкЭћзЫЪЦЕФзЫЪЦПЊЪМЪЧгаАяжњЕФЁЃ ЖдгкJack v9.0ЃЌШЋЩэКЭЪжЪЦПтвбЕУЕНдіЧПЁЃ ећИіЩэЬхзЫЪЦЯждкга11ИіаТЕФзЫЪЦгыЕфаЭЕФзјзЫКЭеОСЂЦРЙРЯрЙиЁЃ ЖдгкЪжЃЌзЫЪЦПтвбБЛаоИФЃЌвдАќРЈИќЯрЙиЕФЪжВПдЫЖЏзЫЪЦЁЃ
зЂвтЃКаТЕФШЋЩэзЫЪЦНіЪЪгУгкаТЕФv9.0ЭМаЮБфЬхЁЃ ЖдгкаТАВзАЃЌетаЉЪ§зжБЛЩшжУЮЊФЌШЯжЕЁЃ ШчЙћвЊДгдчЦкАцБОЕФJackИќаТЃЌдђашвЊдкЦєЖЏJack v9.0жЎЧАЩОГ§HOMEФПТМжаЕФ.jkrcЮФМўЁЃ ЛђепЃЌФњПЩвддкБрМ - >ЯЕЭГФЌШЯжЕЃЌUIбЁЯюПЈжаЪжЖЏНЋетаЉЪ§зжЩшжУЮЊФЌШЯжЕЁЃ
3ЁЂШЮЮёФЃФтЩњГЩЦї - ЧПжЦХфжУШЮЮё
Ждгк9.0АцЃЌЬэМгСЫвЛжжаТЕФШЮЮёРраЭРДАяжњЗжЮіЪжЖЏСІСПЁЃРЉеЙ“гІгУСІ”ШЮЮёЕФИХФюЃЌ“ЧПжЦХфжУЮФМў”ШЮЮёдЪаэФњЯждкФЃФтдкећИіШЮЮёжаЪЉМгСІЕФДѓаЁЗЂЩњБфЛЏЕФГЁОАЃЌР§ШчДђПЊГЕСОв§ЧцИЧЛђдкзщзАЦкМфЗХжУСуМўЁЃПЩвдЪжЖЏЪфШыСІДѓаЁЃЌЛђепЃЌШчЙћСІДЋИаЦїЖСЪ§ПЩгУЃЌдђДгЮФМўжаЖСШЁЁЃгы“гІгУЧПжЦ”ШЮЮёвЛбљЃЌЧПжЦЗНЯђдкЖдЯѓЩЯБОЕиЛђШЋОжЖЈвхЃЌВЂЧв“ЧПжЦХфжУЮФМў”ШЮЮёжЇГжжиаТЖЈЮЛЖдЯѓЁЃОпЬхРДЫЕЃЌетИіаТЕФForce ProfileШЮЮёдЪаэФњЃК
ЪЙгУЭЈЙ§зЫЪЦдкдЫЖЏЦкМфЕФЬиЖЈЪБМфЖЈвхСІСПжЕЁЃСІдкЖСЪ§жЎМфздЖЏВхжЕЁЃ
ПЩбЁдёЖСШыАќКЌЪБМфКЭСІСПжЕЕФЪ§ОнЮФМўЃЌдкЪЕМЪСІДЋИаЦїЖСЪ§ПЩгУЪБЗЧГЃгагУЁЃ
дЄРРЖЏзїЃЌЭЈЙ§ЛЌПщЧсЫЩЙіЖЏЃЌВЂИљОнашвЊЭЈЙ§зЫЪЦБрМИіШЫЁЃ
4ЁЂздЖЏБИЗн
ЪЙгУJack v9.0ЃЌЯждкПЩвдЪЙгУздЖЏБИЗнЙІФмЁЃ ЦєгУ“здЖЏБИЗн”КѓЃЌАќКЌГЁОАХфжУЕФЛЗОГЮФМўНЋАДжИЖЈЕФЪБМфМфИєаДШыJack HomeФПТМЁЃ ШчЙћФњЯЃЭћЛжИДЕННмПЫГЁОАЕФдчЦкзДЬЌЃЌПЩвджБНгДгЮФМўздЖЏБИЗнВЫЕЅМгдиБИЗнЕФ.envЮФМўЁЃ ПЩвдЪЙгУздЖЏБИЗнбЁЯюбЁдёБЃДцЮФМўЕФЦЕТЪЁЃ ЛЙПЩвджИЖЈвЊБЃСєЕФБИЗнЮФМўЪ§ЁЃ дкНјааЕќДњзЫЪЦЛђГЁОАЩшжУВЂЧвФњЯЃЭћЛжИДЕНжЎЧАЕФГЁОАХфжУЪБЃЌДЫЙІФмЗЧГЃгагУЁЃ
5ЁЂдЫЖЏВЖзНЙЄОпАќ - діЧПЙІФм
ЖдгкMotion CaptureЙІФмЕФгУЛЇЃЌv9.0жаЬэМгСЫвЛаЉдіЧПЙІФмЁЃ
жиаТЪЕЯжСЫШЋЩэздЖЏЫѕЗХЃЌдЪаэИќКУЕиНЋJackЭМЪзДЮЫѕЗХЕНЪ§Он
ЯждкПЩвдЬсЙЉШЫЬхВтСПГпДчвдНјвЛВНИФЩЦжїЬхКЭНмПЫЛЏЩэжЎМфЕФЦЅХфЁЃ
ЬэМгСЫЖдNoitomЃЈPerception NeuronЃЉИњзйЦїЕФжЇГжЁЃ
ШэМўЬиЩЋ
1ЁЂДДНЈКЭПЩЪгЛЏЩшМЦЕФ“Ъ§зжФЃаЭ”
JackЮЊФњЬсЙЉСЫДДНЈИХФюФЃаЭЛђНЋЩшМЦЪ§ОнЕМШыащФтЪРНчЕФЫљгаИпМЖЭМаЮЙЄОпЁЃНмПЫЪРНчЕФЩшМЦБфЛЏБШЮвУЧЕФЩшМЦГЩБОИќЕЭЃЌИќКФЪБЁЃ
2ЁЂЗжЮіЩшМЦжаЕФШЫЮЊвђЫи
ГЫдБЛђВйзїдБЩьЪжПЩМАЕФОрРыЃЌЪЪКЯЖШЃЌЪцЪЪЖШКЭЪгСІЖМЪЧВњЦЗЩшМЦжаЕФживЊПМТЧвђЫиЁЃВњЦЗЕФЩшМЦБиаыПМТЧЕННЋЪЙгУЫќУЧЕФШЫЃЁ
3ЁЂдк“ФЃФтЙЄзїГЁЫљ”жабЇЯАШЫРр
НмПЫПЩвддкЙЄГЇЛђАьЙЋЪвВЛжЊЦЃОыЕиНјааВйзїЃЌвдБуФњЩшМЦГізюАВШЋЃЌзюИпаЇЃЌзюИпаЇЕФЙЄзїГЁЫљЁЃ
4ЁЂЦРЙРЮЌЛЄВйзї
ЩњУќжмЦкЕФЮЌЛЄНзЖЮПЩФмгыаэЖрДѓаЭЯЕЭГЕФЯрЕБДѓЕФГЩБОЯрЙиСЊЁЃвђДЫЃЌПМТЧЮЌЛЄКЭЮЌаоШЫдБЕФАВШЋадКЭШЮЮёПЩаааджСЙиживЊЁЃНмПЫЮЊФњЬсЙЉСЫМДЪЙдкзюдчЕФВњЦЗЩшМЦНзЖЮвВФмЦРЙРЮЌЛЄВйзїЕФЙЄОпЁЃ
5ЁЂХрбЕ
ФњЕФЩшМЦФЃФтПЩвдЬсЙЉЫЋжиШЮЮёЃКХрбЕВйзїдБЃЌЮЌЛЄШЫдБЛђОќЪТШЫдБЃЌЩѕжСдкВњЦЗЛђЩшЪЉНЈдьжЎЧАКмОУЁЃетбљзіЪЧдкУЛга“ЯжЪЕЩњЛю”бЕСЗЕФЮЃЯеКЭЩЅЪЇЩњВњСІЕФЧщПіЯТЭъГЩЕФЁЃ
6ЁЂбаОП
JacksЪЧвЛИіЯъЯИЕФСДНгЖЮФЃаЭЃЌОпгаЩњЮябЇЩЯзМШЗЕФдЫЖЏдЄВтКЭЙиНкдЫЖЏбЇЁЃМИКѕПЩвдДгНмПЫМьЫїЮоЧюЮоОЁЕФЪ§ОнЁЃ Jack ToolkitКЭПЊЗХAPIЪЧНјШыJackПђМмЛђВхШыздЖЈвхЙЄОпЕФРэЯыЮЛжУЁЃ
ЮвУЧЛЙУЛгаПМТЧЙ§ЕФЪТЧщ......НмПЫЬсЙЉСЫФЃФтИДдгЯЕЭГЃЌбаОПЫќУЧЕФдЫЖЏвдМАФЃФтШЫРрШчКЮЪЙгУЫќУЧЫљашЕФЙЄОпЁЃЮвУЧЕФгУЛЇВЛЖЯЮЊJackбАеваТЕФЖРЬигІгУГЬађЃЌЮвУЧЯЃЭћФњвВФмЃЁ ЃЈЕБШЛЃЌетДЮХрбЕЪЧЕквЛВН......ЃЉ
гыаэЖр3DЩшМЦКЭПЩЪгЛЏЯЕЭГВЛЭЌЃЌНмПЫБОЩэЪЙгУЧхЮњЕФШЫЮяЁЃМђЕЅРДЫЕЃЌНмПЫЕФЪРНчГфТњСЫвЦЖЏЕФЮяЬхЃЌОЭЯёдкЯжЪЕЩњЛюжавЛбљЁЃНмПЫЬсЙЉСЫвЛИіЗЧГЃЧПДѓЕФЯЕЭГЃЌгУгкФЃФтНТНгЭМаЮЁЃЕБШЛЃЌетИіСьгђзюПСПЬЕФгІгУжЎвЛЪЧШЫЬхЃЁ JackПЊЗЂЕФжиЕувЛжБМЏжадкДДНЈШЮКЮЯЕЭГжазюзМШЗЕФШЫЬхФЃаЭЁЃ
НмПЫзюДѓЕФгХЪЦдкгкФмЙЛЭЈЙ§ОпгаЪЪЕБЩњЮяСІбЇЃЌШЫЬхВтСПбЇКЭШЫЬхЙЄГЬбЇЬиеїЕФФЃФтШЫ“ЬюГф”ащФтЪРНчЁЃНмПЫШЫПДЦ№РДЯёецШЫвЛбљЁЃ
НмПЫШЫСЫНтЦНКтЃЌаазпКЭОйжиЁЃЫћУЧга“СІСП”ЃЌПЩвдИцЫпФуШЮЮёЪЧЗёГЌГіСЫЫћУЧЕФМЋЯоЁЃШчЙћФњЖЈвхЕФВйзїГЌГіЯожЦЃЌНмПЫПЩвдМЦЫуГіВЛЛсЕФЖЏзїЃЁФњПЩвдИљОнОЙ§бщжЄЕФШЫЬхВтСПЪ§ОнПтЖдШЮКЮЩэВФЕФФаадКЭХЎадНјааНЈФЃЁЃНмПЫШЫРрОпгагыЯжЪЕЪРНчжаЕфаЭШЫРрЯрЭЌЕФЙиНкЯожЦЃЈдЫЖЏЗЖЮЇЃЉЁЃ
етжжНЈФЃЃЌЗТецКЭЗжЮіашвЊЧПДѓЕФЭМаЮВщПДЛЗОГЃЌвзгкЪЙгУЕФНчУцКЭвЛећЬзУќСюЙІФмЁЃНмПЫЬсЙЉСЫЫљгаетаЉЁЃ
7ЁЂгУгкНЈФЃANYНТНгЭМЕФЯЕЭГ
ЭъећЕФЗжВуЪ§ОнПтЃЌЭъећЕФСЊКЯПтЃЌжїЖЏдМЪјЃЌХізВМьВтЃЌЪЕЪБдЫЖЏбЇКЭЖЏЬЌФЃФтЁЃ
8ЁЂШЫЬх
ЛљгкЪ§ОнПтЛђВтСПЕФШЫЬхВтСПЫѕЗХ; ОпгаИДдгЙиНкЕФИпБЃецЩњЮяСІбЇЃЌвдМАЭъШЋНТНгЕФЪжКЭМЙжљФЃаЭ; здЖЏзЅШЁОЋШЗЛђЖЏСІзЅЮеЕФВПЗжТжРЊКЭШЋЪжаЮзДПтЃЌТЗОЖаазпдЫЖЏЃЌЭЗблаЕїКЭЦНКтааЮЊЁЃ
9ЁЂЪЕЪБЙлПДЛЗОГ
НЛЛЅЪНЙлПДЃЌЖрИіДАПкЃЌЕЦЙтКЭЯрЛњЃЌЮЦРэКЭОЕЯёЃЈЪЕЪБЃЁЃЉЃЌ
10ЁЂЭъећЕФЖЏЛКЭШЮЮёФЃФтЯЕЭГ
ЛљгкФПБъЕФЖЏЛКЭЛљгкШЮЮёЕФФЃФтЃЈВНааЃЌЛёШЁЃЌЗХжУЃЉЃЌвдМАЕчгАЮФМўЕФздЖЏж№жЁжЦзїЁЃ
11ЁЂЧПДѓЕФРЉеЙ
КъгябдЃЌПЩЖЈжЦВЫЕЅЃЌЩѕжСЧЖШыЪНLispЃЌPythonКЭTcl / TKБрГЬЯЕЭГЁЃ
12ЁЂЭъећЕФVRЯЕЭГ
ЭъећЕФГСНўЪНЙІФм; жЇГжСЂЬхблОЕЃЌЭЗДїЪНЯдЪОЦїЃЈHMDЃЉЃЌЪ§ОнЪжЬзКЭШЋЩэдЫЖЏИњзйЁЃ
ЪЙгУАяжњ
НчУц
ЕБФњЦєЖЏJackЪБЃЌФњНЋПДЕНЭМаЮгУЛЇНчУцЁЃ ФЌШЯНчУцАќРЈГЪЯжЖдЯѓЕФGRAPHICS WINDOWЃЈSЃЉКЭАќКЌБъзМВЫЕЅКЭЭМБъЕФCONTROL BARЁЃ ДЫЭтЃЌJackгавЛИіOBJECT HIERARCHYЃЌЦфжаЯдЪОСЫЛЗОГСаБэЃЌSESSION LOGКЭМИИіНХБОПижЦЬЈЁЃ
НмПЫЕФЫљгаДАЛЇЖМЭъШЋЖРСЂЃЌПЩИљОнФњЕФЯВКУНјаавЦЖЏЁЃ JackжаЪЙгУЕФДАПкЃЌВЫЕЅКЭЙЄОпРИЗћКЯБъзМЕФWindowsааЮЊКЭВйзїЗНЗЈЁЃ ЮЊЗНБуЦ№МћЃЌJackЛЙАќКЌМИИіЗЧБъзМЙІФмЁЃ
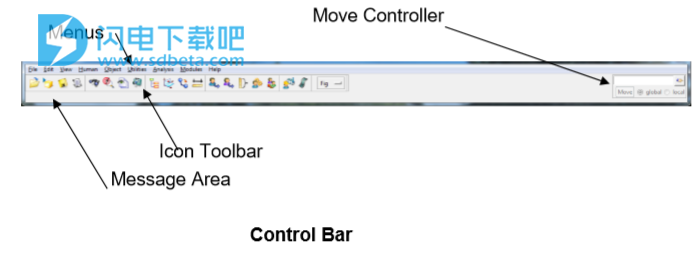
ПижЦРИ
CONTROL BARЗжЮЊЫФИіЧјгђЃКMENUSЃЌICON TOOLBARЃЌMESSAGE AREAКЭMOVE CONTROLLERЁЃ ЫќЭЈЙ§ВЫЕЅКЭЭМаЮЭМБъЬсЙЉЖдМИКѕЫљгаJackЙІФмЕФЗУЮЪЁЃ ЯТЭМЫЕУїСЫCONTROL BARЕФжївЊЧјгђЁЃ
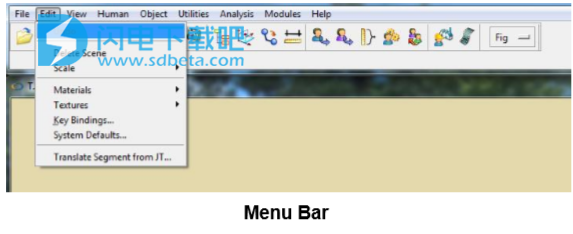
ВЫЕЅ
MENU LINEЮЊJackЕФУќСюНсЙЙЬсЙЉСЫЦ№ЕуЁЃ ВЫЕЅВЩгУБъзМДАПкИёЪНЃЌжЛашЕЅЛїЪѓБъзѓМќ<LMB>МДПЩЗУЮЪЁЃ АќРЈЮФМўЃЌБрМЃЌВщПДвдМАЩцМАШЫЃЌЖдЯѓЃЌЪЕгУГЬађКЭЗжЮіЕФНмПЫЬиЖЈЮЪЬтЁЃ ДЫЭтЃЌJackЛЙЬсЙЉСЫвЛИіФЃПщЯЕЭГЃЌдЪаэдкдЫааЪБНЋИќЖрЙІФмЬэМгЕНШэМўжаЁЃ JackЬсЙЉСЫаэЖрзЈгУФЃПщЃЌФњПЩвдЧсЫЩДДНЈздМКЕФФЃПщЁЃ
ЭМБъЙЄОпРИ
TOOL BARЭМБъПЩШУФњПьЫйЗУЮЪГЃгУЙІФмЁЃ
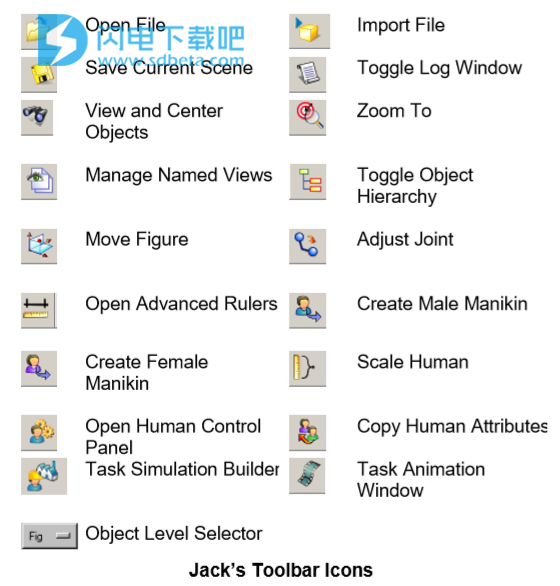
вдЩЯЫљгаЭМБъЖМЛсжДааСЂМДВйзїЛђРГіГ§OBJECT SELECTORжЎЭтЕФЯргІЖдЛАПђЁЃ ДЫЙІФмЛсгАЯьЭМаЮДАПкжаЕФКѓајВйзїЃЌБОЪжВсЩдКѓНЋЖдДЫНјааНщЩмЁЃ
зЂвтЃКдкГЂЪдШЮКЮЖдЯѓВйзїжЎЧАЃЌзюКУЯШбщжЄOBJECT SELECTORЭМБъДАПкжаЪЧЗёЯдЪОСЫдЄЦкЕФЖдЯѓРраЭЁЃ
ЖдЯѓбЁдёЦї
OBJECT SELECTORгыGRAPHICS WINDOWвЛЦ№ЪЙгУЁЃ ЕБЧАЖдЯѓРраЭШЗЖЈЕБФњдкЖдЯѓЩЯ<RMB>ЛђдкЪАШЁФЃЪНЯТЕФЖдЯѓРраЭЪБЯдЪОФФИіЩЯЯТЮФУєИаВЫЕЅЁЃ

ФњПЩвдбЁдёJackЕФШЮКЮЛљБОЖдЯѓРраЭРДгАЯьЩЯЯТЮФУєИаВЫЕЅЃКЭМЃЌЖЮЃЌеОЕуЛђЙиНкЃЈетаЉНЋдкЕк2еТжаЖЈвхЃЉЁЃФњПЩвдЭЈЙ§OBJECT SELECTOR'S DROP-DOWN LISTНјаабЁдёЃЌЛђепЭЈЙ§АДGRAPHICS WINDOWжаЕФ<MMB>ЙіЖЏЛљБОЖдЯѓРраЭЁЃФњЛЙПЩвдЭЈЙ§гвМќЕЅЛїдЖРыGRAPHICS WINDOWжаЖдЯѓЕФЩЯЯТЮФУєИаВЫЕЅРДЗУЮЪДАПкВЮЪ§ЁЃ
“ЪАШЁФЃЪН”дкGRAPHICSДАПкжаЫбЫїЬиЖЈЕФЖдЯѓРраЭЁЃдкетжжЧщПіЯТЃЌЕБФњдкJackЕФЖдЛАПђжаАДЯргІЕФЪжбЁдёЦїЭМБъЪБЃЌЛсздЖЏИќИФЖдЯѓРраЭЁЃГ§СЫНмПЫЕФЛљБОЖдЯѓРраЭЃЌФњЛЙПЩвдбЁдёУцЃЌБпКЭНкЕуЁЃ
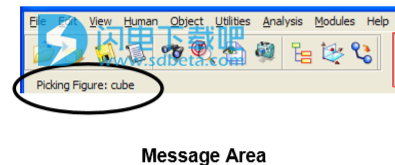
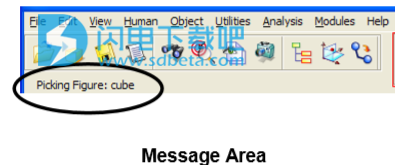
ЯћЯЂЧјгђ
ЕБФњгыНмПЫЛЅЖЏЪБЃЌMESSAGE AREAЛсЮЊФњЬсЙЉгаЙиВйзїКЭ“ЙЄОпЬсЪО”ЕФЗДРЁЁЃР§ШчЃЌНЋЪѓБъжИеывЦЖЏЕНTOOLBARЭМБъЩЯЪБЃЌФњНЋПДЕНУПИіЭМБъЙІФмЕФУшЪіЁЃдкGRAPHICS WINDOWжавЦЖЏЪѓБъЙтБъЪБЃЌMESSAGE AREAНЋЯдЪОЕБЧАЪѓБъжИеыЯТЕФ“Object”ЕФУћГЦЁЃдкЖСШЁЪ§ОнЮФМўЪБЃЌMESSAGE AREAНЋЮЊФњЬсЙЉгаЙиВйзїНјЖШЕФЗДРЁЁЃ
зЂвтЃКЙлВьЯћЯЂЧјгђвдЛёШЁаэЖрГЃМћНЛЛЅжаЕФгагУаХЯЂЁЃ
вЦЖЏПижЦЦї
MOVE CONTROLLERАќКЌгУгкдкJackЛЗОГжавЦЖЏЫљгаЖдЯѓРраЭЕФПиМўЁЃ гЩгкетЪЧгыНмПЫКЯзїЕФвЛИіжївЊВПЗжЃЌвђДЫЫќЪМжедкЪгвАжаЧввзгкЗУЮЪЁЃ
ЪЙгУ“ЪжаЮбЁдёЦї”бЁдёвЊвЦЖЏЕФЖдЯѓЁЃ НмПЫРћгУЕбПЈЖћзјБъЯЕЭГЃЌжЛЪЧПеМфжаЕФШ§ЮЌXЃЌYКЭZжсРДЖЈвхЮЛжУКЭЗНЯђЁЃ ФњПЩвддкMOVE CONTROLLERжаЪфШызјБъЃЌвВПЩвдЪЙгУЪѓБъвдНЛЛЅЗНЪНвЦЖЏЖдЯѓЁЃ
ФњПЩвдЭЈЙ§ЗжБ№АДзЁЪѓБъзѓМќ<LMB>ЛђЪѓБъгвМќ<RMB>РДбиxжсЛђzжсвЦЖЏЭМаЮЁЃ вЊЯђЩЯвЦЖЏЭМаЮЃЈбиyжсЃЉЃЌЧыЪЙгУЪѓБъжаМќ<MMB>ЁЃ вЛИіДѓЕФКьЩЋМ§ЭЗБэЪОЫљбЁЕФвЦЖЏЗНЯђЁЃ ФњЛЙПЩвдЭЈЙ§АДзЁ<Shift>МќКЭ<LMB>ЃЌ<MMB>Лђ<RMB>РДЮЇШЦШЮКЮжса§зЊЭМаЮЁЃ 3DВЮПМЃЈXYZЃЉПЩвдЯрЖдгкШЋОжВЮПМЛђЬиЖЈгкЖдЯѓЕФБОЕиВЮПМЁЃ ЕЋЪЧЃЌMOVE CONTROLLERжаЯдЪОЕФзјБъЪМжеЪЧШЋОжзјБъЁЃ
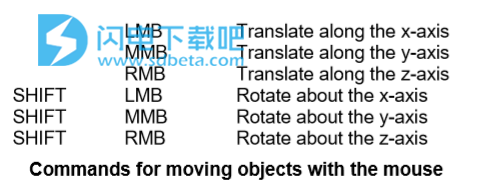
зЂвтЃКЭЌЪБАДзЁСНИіЪѓБъАДХЅПЩвддкСНИіЯргІжсПчдНЕФЦНУцжавЦЖЏЖдЯѓЁЃ
вЦЖЏ - ЭЈЙ§
ДЫЙІФмдЪаэЛљгкШЮвтВЮПМЕувЦЖЏШЮКЮЭМаЮЁЃ НмПЫвбОгаФмСІНЋ“Пьее”гІгУгкШЫЮяЕФHЕу; ДЫЙІФмПЩвдЛљгкШЮКЮЯжгаеОЕуЛђНкЕуЖдШЮКЮЭМаЮНјааВЖзНЛђЪЕМЪгІгУШЮКЮЦфЫћвЦЖЏЁЃ

JTЪ§зжУЛгадЩњНмПЫМИКЮЃЌЬиБ№ЪЧУЛгаНкЕуЁЃЖдгкетаЉЪ§зжЃЌ“АДНкЕувЦЖЏ”ВЛПЩгУЁЃЕЋЪЧЃЌ“АДеОЕувЦЖЏ”ЬсЙЉСЫСэвЛжжвЦЖЏетаЉЭМаЮЕФЗНЗЈЃЌМДдкГЁОАЕФШЋОждЕуЖЈвхИљЭјеОЖјВЛЪЧЭМаЮЕФМИКЮЭМаЮЕФОжВПЁЃЪЙгУ“snap-to-cursor”moveУќСюЩшжУеОЕуЮЛжУЃЌдкЖдЯѓЕФМИКЮЬхЩЯДДНЈвЛИіеОЕуЁЃЯждкЃЌШЫУЧПЩвдЭЈЙ§МИКЮЬхЩЯЕФвЛИіеОЕувЦЖЏJTЭМаЮЃЌетЪЙЕУБфЛЛЕїећИќМгжБЙлЁЃ
ЖдгкШЫРрЪ§зжЃЌГ§ИљжЎЭтЕФ“АДеОЕувЦЖЏ”ПЩФмгыФГаЉааЮЊЛђдМЪјЯрУЌЖмЁЃР§ШчЃЌвЊЧѓвЛИіЪжБл“ЯрЖдгкЮяЬх”ЃЌШЛКѓЪдЭМЭЈЙ§ЫќЕФМчАђвЦЖЏШЫРрЃЁЧызЂвтЃЌФГаЉзщКЯПЩФмЛсЕМжТШЫРрдкУЌЖмЕФвЊЧѓЯТ“БРРЃ”ЁЃЭЈГЃзюКУжЛдкШЫЕФЦНКтааЮЊЮЊ“ЪЭЗХ”ЪБвЦЖЏШЫЁЃ
ШЋЧђгыЕиЗНзЊаЭ
ЕНФПЧАЮЊжЙЫљУшЪіЕФдЫЖЏВйзїбизХШЋОжзјБъжсВйзїЁЃгаЪБбизХгыЭМаЮБОЩэЯрЙиЕФжсЦНвЦЛђа§зЊЪЧЗНБуЕФЁЃШЋОжБфЛЛКЭОжВПБфЛЛЬсЙЉСЫвЛжжЯрЖдгкШЋОжЛЗОГЛђЦфЕБЧАЗНЯђНЛЛЅЪНЖЈЮЛЖдЯѓЕФЗНЗЈЁЃ










