RecurDyn V9R5破解版是一款功能强大的动态和运动仿真软件、多体运动学仿真和CAE软件,使用旨在为用户能够快速的进行多柔体动力学(MFBD)的仿真和预测,能够对由固体组成的机构和设备运动的预测,可以将这些实体建模为刚性或柔性体。 RecurDyn包含许多组件,例如有限元分析(FEA),优化设计,自动控制,疲劳分析以及刚性多体动力学。RecurDyn基于递归公式,因此具有出色的计算效率。因此,RecurDyn在大规模多体问题(具有大量物体的系统)中,包括在其中物体之间的复杂接触非常重要的机械系统中,可以提供最佳性能。 RecurDyn还具有直观,易于使用的基于Windows的自然用户界面,以及使用户能够自动执行复杂和/或繁琐任务的自定义应用程序开发环境。RecurDyn具有最快的线性求解器,非常适合包含刚性和柔性物体的MFBD模型。并且可进行实体之间的快速联系,易于定义和快速仿真。甚至可以为导入的CAD几何图形快速定义接触。由于FunctionBay独特的接触算法结合了机械工程和计算机科学的高效,准确的方法,RecurDyn的接触模型的计算速度异常快。除此之外,RecurDyn还可以轻松地从CAD软件接受建模数据。本次带来RecurDyn V9R5破解版下载,安装包中含破解文件,有需要的朋友不要错过了 !
安装破解教程
1、在本站下载并解压,如图所示,得到Recurdyn.V9R3.BN93091.Full.Version.X64.iso安装镜像和crack破解文件夹

2、加载Recurdyn.V9R3.BN93091.Full.Version.X64.iso,双击autorun.exe运行安装,选择安装RecurDyn和RecurDyn Viewer(可选),注意
不要安装许可证服务器
3、语言默认简体中文,如图所示,勾选我接受许可协议中的条款,点击下一步
4、输入任意用户名和公司名,点击下一步
5、选择软件安装路径,可直接将C改为其他盘符
6、选择安装类型,全部安装或者自定义安装,点击下一步并等待安装
7、安装完成
不要选择许可证,如图所示,直接关闭
8、不要运行软件,将crack文件夹中的
RecurDyn V9R3文件夹复制到安装目录中,点击替换目标中的文件,默认路径为C:\ Program Files \ FunctionBay,Inc \ RecurDyn V9R3(如果您安装了
RecurDyn V9R3 Viewer,还要将RecurDyn V9R3 Viewer文件夹复制到安装目录中,替换目标中的文件,默认路径C:\ Program Files \ FunctionBay,Inc \ RecurDyn V9R3 Viewer)
9、现在将crack中的blmd_SSQ.dat复制到您的计算机安装位置,例如说是安装目录中,并且我们需要创建一个系统环境变量
变量名:FBLMD_LICENSE_FILE
变量值:
指向fblmd_SSQ.dat的路径

功能特色
1、微分方程求解器
RecurDyn包含许多微分方程求解器,称为“积分器”,用于求解描述多体系统运动的方程组。这些方程被称为微分代数方程(DAEs),它是描述运动的微分方程和封装关节约束的代数方程的组合。众所周知,DAE很难解决。RecurDyn的集成商强大而快速,提供快速计算和可靠的解决方案。RecurDyn的主要多体动力学积分器是Generalized-Alpha方法。它还包含针对各种其他问题类型的其他专用解算器,例如用于对履带式车辆进行建模,例如挖掘机和军用战斗坦克。
2、线性求解器
RecurDyn的线性求解器是同类产品中最好的。它是一种多正面,直接,稀疏线性求解器,针对多体动力学中的约束动力学方程进行了优化。该线性求解器最大限度地利用了当今的多核CPU技术。
3、领先的接触配方
接触对于多体动力学模拟非常重要。在许多机械系统中,身体通过与其他身体接触的身体相互作用。此外,接触在数学上和数字上也非常复杂,并且难以为大多数软件建模。但是,RecurDyn提供了非常先进,坚固且易于使用的接触配方。RecurDyn的接触式建模可实现非常快速的仿真,并提供非常可靠的结果。
4、高级,集成,直观的GUI
RecurDyn的GUI非常强大,但由于其直观的设计,它易于使用。它包含一个完全集成的环境,用于模型开发,模拟和结果分析。用于模型创建和参数定义的预处理以及用于分析结果的后处理直接集成到GUI中。可以导入以工业标准CAD格式定义的实体,以定义实体的属性和几何形状。GUI中还存在各种自定义选项,可通过自动执行常见任务来提高工作效率。
5、快速准确的求解器以及直观的UI
1)直觉的Ul
lUI允许设计人员快速方便地执行建模。
2)高性能图形引擎
MBD优化的图形引擎可轻松操作复杂模型。
3)简单的刚体几何造型高
由于嵌入式Parasolid内核(在Parasolid,STEP IGES,STL,ACIS,CATPart和CATProduct格式中导入CAD数据)与CAD软件的兼容性支持几何创建和编辑(即使对于导入的几何体)
4)快速准确的求解器
递归公式和隐式G-Alpha整合器可以快速,准确,稳健地执行模拟。 RecurDyn的联系算法非常强大,可以分析复杂联系人的问题。
5)快速方便的后处理器
动画和绘图输出使您可以轻松直观地检查动态分析的结果,例如位移的大小和方向,速度,加速度和力。
使用说明
一、body身
实体可以包含一个或多个几何实体和标记。用户必须为实体定义至少一个几何实体。否则,用户可能会在以后的操作中面临困难。身体需要定义质量特征。这些是根据定义的身体几何形状自动计算的,但是用户可以更改它。仅针对实体几何实体计算质量和惯性矩。曲面,直线和曲线的质量为零。
创建身体时,用户需要通过更改三种模式进行建模
£用户可以在组装模式下使用几何实体库创建实体。但是,用户必须使用“主体编辑”模式来修改主体。为了创建由多个复杂形状的几何实体组成的实体,用户必须进入“实体编辑”模式。在装配模式下,双击现有的几何实体以进入实体编辑模式。
通过从平面轮廓开始也可以生成实体或表面几何实体。用户可以在“概要文件编辑”模式下创建或修改概要文件。从“身体编辑”模式的“几何”选项卡中单击“轮廓”组的“轮廓”图标,以进入“轮廓编辑”模式。
用户可以使用“对象控制”来重定位一组选定的实体并为其重新定向。如果用户尝试移动与参数点相关的实体,则将打开警告消息窗口,如下图所示。尽管所有参数连接均断开,但用户可以在单击“确定”后使用“对象控制”将其移动。
图1应用对象控制时的警告消息
图2“专业”选项卡中的“标记和正文”组
1、坐标系
图1显示了为身体定义的标记。RecurDyn模型必须具有一个惯性参考系,该参考系附着到地面并默认情况下自动创建。用户无法删除惯性系。
图1身体和坐标系
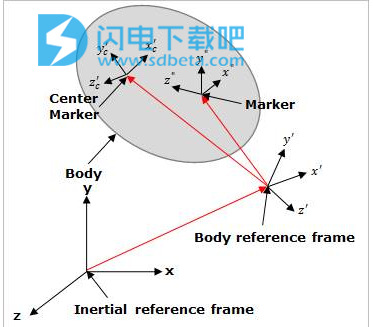
身体具有一个身体参考框架和一个用于质心的参考框架(中心标记)。必须相对于身体参照系定义所有标记。原点在“标记”属性页面中指定标记的原点。用户可以通过313/321欧拉角或坐标轴上的点定义的坐标来指定标记的方向。
二、联合
约束实体或关节实体定义了零件(刚性实体,柔性实体或点质量)如何相互连接以及它们如何相对移动。两个实体之间的相对运动可以由约束实体关联。约束实体限制零件之间的相对运动并代表理想的连接。约束实体的公式可以在参考中找到。连接信息在“联合属性”页面中描述。用户可以在关节属性对话框中修改信息。此外,用户可以在“接头属性”页面中指定“运动”,“初始条件”和“摩擦”。
参考
YangK.D.Yang,S。H.Lee,D。S.Bae和M.S.Suh,“在构造笛卡尔方程时使用联合几何条件”,《结构和机械力学》,第23卷,第3期,第395-417页,1995年
1、通用UI
创建联合实体后,用户可以使用“联合属性”页面修改联合实体的信息。
一般页面:
该页面指定关节的名称,单位,注释,层号和无效标志。
图1联合属性页面[常规页面]
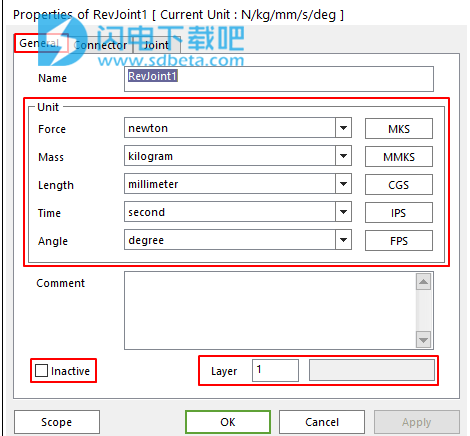
£名称:指定关节的名称。
£单位:指定关节的单位。如果用户更改单位,则用户可以使用新单位输入所有输入。关闭属性页面后,所有以关节为单位给出的值将自动转换为系统单位。
£评论:允许输入有关当前关节的评论。用户可以在编辑框中写下关节的说明。
£层号:指定关节的层号。
£非活动标志:检查活动或非活动关节。
连接器页面:
该页面更改了基础实体和行动实体的联合实体之间的关系。
图1联合属性页面[连接器页面]
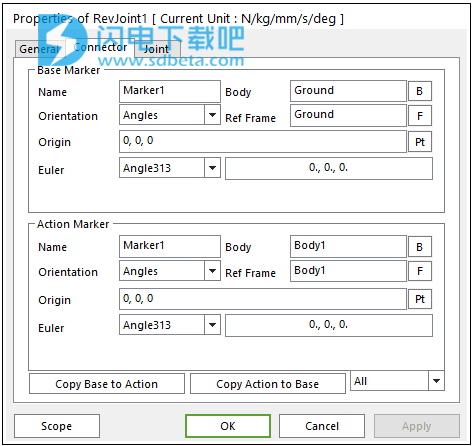
£基本和动作标记:所有点均相对于惯性参考系进行测量。
·名称:定义制造者的名称。
·主体:定义标记的母体。
·参考框架:定义关节的参考框架。相对于参考系测量原点和方向。
·欧拉角:选择321或313欧拉角。
o欧拉角可以定义为参数值。如果用户输入参数值,则单位为弧度。因此,如果用户要输入度值,则用户必须在参数值中添加“D”字符,例如“90D”。
£将基准复制到动作:将基准标记的原点或方向复制到动作标记。
£将动作复制到基准:将动作标记的原点或方向复制到基准标记。
£复制选项
·全部:复制原点和方向
·原点:仅复制原点
·方向:仅复制方向。
联合页:
上一页下一页
用户可以定义关节的运动,初始条件和摩擦。此页面根据每种关节类型而有所不同。
图1联合属性页面[联合页面]
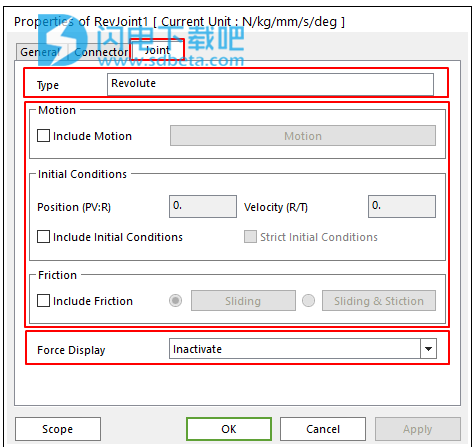
£Type:显示关节的类型。
£运动
·包含运动:创建关节运动。欲了解更多信息,请点击这里。
£初始条件
·包括初始条件:如果选中,则启用用户指定的初始条件(位置和速度)。
o位置(PV:R):定义关节的初始相对位置差。相对位置差可以是2个标记之间的角度差或平移位置差,具体取决于关节类型。
oVelocity(R/T):定义关节的初始相对速度差。相对速度差可以是2个标记之间的角速度差或平移速度差,具体取决于关节类型。
·严格的初始条件:指示应严格执行初始条件设置。仅当还选择了包括初始条件时,才可以选择此选项。仅旋转,平移和圆柱关节支持此功能。
o除非选择严格的初始条件,否则不能保证满足初始条件。如果选择了包括运动,则不能选择初始条件。
o运动和初始条件不能一起使用。
o如果选择了包括初始条件,但未选择严格初始条件,则初始条件仅用作系统初始位置和速度的初始猜测。RecurDyn可以调整初始位置和速度,以满足约束条件。
o如果选择“严格的初始条件”,则此关节的初始位置和速度将被视为初始位置和速度必须满足的严格约束。
o连接到FFlex主体的接头的初始条件受到限制。对于连接到预分析中包含的FFlex主体的旋转接头(旋转接头和圆柱接头),初始旋转必须大于-90度且小于90度。
£摩擦
·包括摩擦:如果选中此选项,则用户定义接头的摩擦。必须检查它是否触发摩擦力。
o滑动:定义旋转和平移关节上的滑动摩擦力。
o滑动和静摩擦:定义旋转,平移,圆柱,球形和万向节上的滑动和静摩擦力。
£力显示:在工作窗口上以图形方式显示合力矢量。显示的力可以通过如图2所示来定义。
图2约束力的定义
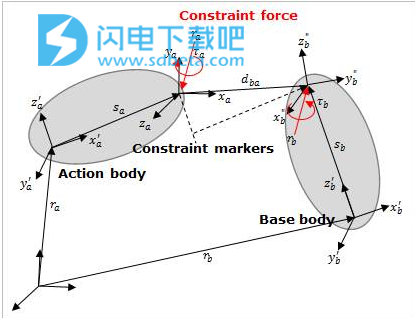
·未激活:强制图形显示未激活。
·行动
oPTCV&CVCV:施加在作用体上的约束力和扭矩显示在接触位置。
o其他:通过在该位置显示的约束力在操作体的约束标记上概括的力和转矩。显示的力可以如下式所示。
·基地
oPTCV,CVCV:施加在基体上的约束力和扭矩显示在接触位置。
o其他:通过在该位置上显示的约束力在基体的约束标记上概括的力和转矩。显示的力可以如下式所示。
·两者:这同时在每个实体的两个约束标记的位置显示作用力和反作用力。
运动:
上一页下一页
通过用户子例程中的功能表达式或MOTION_USUB,使用运动来规定旋转,平移,圆柱,CMotion和PTCV关节的相对运动。运动仅是时间,变量和diff变量的函数。要使用动作,用户必须在“表达式列表”对话框中定义一个表达式。
使用表达式的步骤
1.在“关节”属性页面上,选中“包括运动”选项。
2.在“关节”属性页面上单击“运动”,如图1所示。
图1“运动”对话框[标准类型]

3.选择一个表达式类型。
£排量(时间):定义为排量类型
£速度(时间):定义为速度类型
£加速度(时间):定义为加速度类型
4.选择一种类型作为“标准运动”。
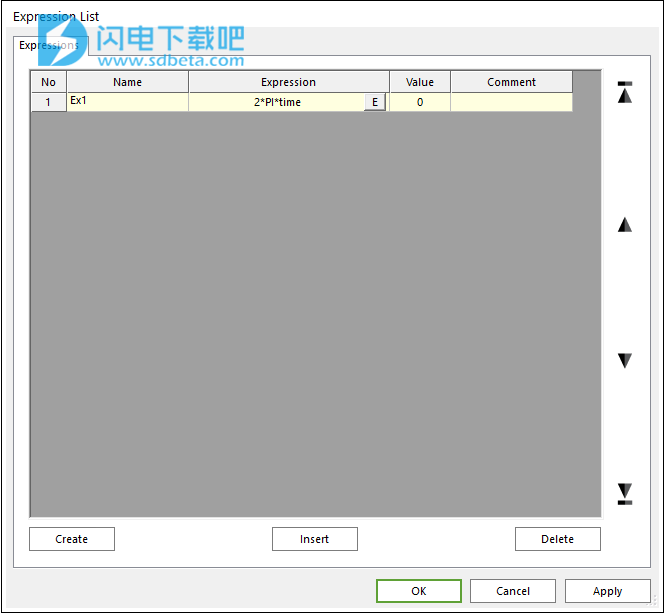
5.单击EL,然后出现“表达式”对话框。如果用户要使用预定义的表达式,请选择表达式的数量。否则,用户必须创建一个表达式。欲了解更多信息,请点击这里。
图2表达式列表对话框
使用用户子例程的步骤
1.在“关节”属性页面上,选中“包括运动”选项。
2.在“关节”属性页面上单击“运动”,如图3所示。
图3运动对话框[用户子程序类型]

3.将类型更改为“用户子例程”。
4.单击UL,然后出现“用户子例程”对话框。如果用户要使用预定义的用户子例程,请选择用户子例程的编号。否则,用户必须创建用户子例程。欲了解更多信息,请点击这里。
图4“用户子例程列表”对话框