Ansys Motion2022破解版是基于灵活多体动力学的下一代工程解决方案。它可以在单个求解器系统中快速而准确地分析刚体和柔性体。具有紧密集成的多体和结构求解器可为刚体运动和变形的一系列耦合问题提供高度精确的解决方案。这些结果对于许多行业应用程序的设计过程中的系统运动性能,应力安全性分析,振动分析和疲劳分析很有用。图形用户界面(GUI)为组件和系统提供了完全集成的建模环境。管理具有网格或刚体或子系统的每个组件的数据,以便可以独立修改和分析组件。当必须在系统中包括一个组件时,有许多建模用户界面工具可以有效地处理多个组件。GUI提供了一个开放的API用于用户自定义,可以轻松地与MS / EXCEL链接。用户可以构建一个EXCEL环境,以在后台控制Ansys Motion API。集成到经过行业验证的Ansys Mechanical环境中进行预处理,从而减少了模型设置时间并提高了用户生产率!全新破解版下载,含破解文件,有需要的朋友不要错过了!
安装激活教程
1、在本站下载并解压,如图所示
2、要安装 ANSYS MOTION 2022R1,您需要预安装带有 SSQ 破解的 ANSYS Products 2022R1!双击ANSYSMotionSetup.exe运行安装,勾选接受许可证协议条款
3、选择软件安装路径
4、安装完成,退出向导
5、将破解文件夹中的ANSYS Inc文件夹复制到安装目录中,点击替换目标中的文件,默认路径C:\Program Files\ANSYS Inc
6、然后创建一个系统环境变量,系统环境变量ANSYSLIC_DIR指向<ANSYS Inc程序文件夹> \ Shared Files \ Licensing(默认情况下为C:\Program Files\ANSYS Inc\Shared Files\Licensing)
新功能介绍
一、大规模并行处理
开发了基于PCG技术的大规模并行过程(MPP)求解器。 新的MPP求解器支持Windows以及Linux操作系统。 还提供了安装指南,它有助于在目标系统上轻松安装。
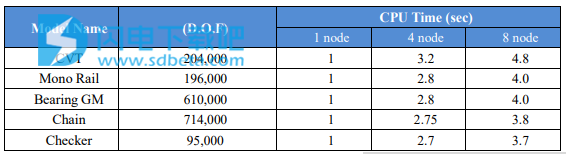
性能
下表显示了相对性能,取决于每个模拟使用多少个节点。 根据该表,性能的特征与自由度以及模型的形状有关。 而且,在使用的节点数上的可伸缩性非常好,因此可以为每个节点使用额外的核心来最大化求解性能。
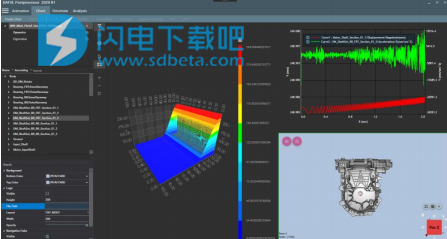
二、新的后处理器
自8年前发布以来,全新的后处理器以开放测试版形式发布。为了包含所有现有功能,已经开发出了上一个不存在的显着功能,即使它仍在开发中。以下各项说明了在后处理器中实现的新概念。
•Ribbon UI – Ribbon UI –经常使用的主要功能可以从程序顶部访问。标准功能区的概念适用于直观的操作和轻松的访问。
•快速更新–不需要更明确的更新操作。每个更改立即应用到屏幕或绘图窗口上,没有时间延迟。它最大程度地减少了操作次数,并最大程度地提高了可用性。
•性能改进–即使处理沉重的模型,改进的性能也可以帮助您轻松控制它。此外,还改善了恢复应力,应变和绘图曲线性能的计算。
•拖放操作–为了切换任意曲线的目标绘图视图,通过拖放操作,您可以轻松地做到这一点。不仅可以更改绘图轴位置,还可以通过拖放操作来修改切割平面设置。
•操作建议–某些项目(如主体,标记)最常用的功能将显示在窗口中,以快速显示访问。它最大程度地减少了鼠标移动的距离,并易于使您理解可以做什么。
1、新开发的功能
以下是一些比先前功能开发和改进的主要功能。 除了这些功能,您还可以在新的后处理器中找到更有用的功能。
a)操作指南
在动画窗口中选择一个实体后,会在窗口的一角激活几个快速访问图标,以指导您进行诸如隐藏之类的常用操作。 图标类型将取决于所选实体而被激活,使您可以快速轻松地进行操作。
此外,总是在窗口上显示某些选项,例如视图控制器和动画立方体。
 b)多轴
b)多轴
每个不同的物理量都有不同的数值水平,如果使用一个轴,则每个图形的图形都不容易看到。 多轴有助于在合理范围内一起查看它们。
c)浮动动画/图表视图
可以根据需要添加动画/图表视图。而且,可以通过拖放操作轻松地排列这些“视图”。该功能的亮点是它们中的每一个都可以分离并移至主后处理器之外。当您比较某个结果和预处理器模型时,它将很有用。
d)3D瀑布图
现在可以使用3D瀑布图,它将为您提供更多的洞察力来研究NVH水平的相对大小。
e)动画查看器
可执行查看器现在可用。由CEETRON开发并提供后处理器引擎的名为“ Ceetron 3D Viewer”的特殊软件能够读取“ VTFx”格式的文件,该文件可以从新的后处理器中导出。最重要的是,CEETRON支持与VTFx文件一起使用的MS-office插件,它使演示者可以在演示时进行简单的视图控制。
查看器和插件不需要任何许可,也可以免费用于任何目的,以便您可以与没有后处理器许可的人共享结果。
2、功能缺失
导入数值数据
将数字数据作为文本导入,CSV
声压分析
机械系统引起的与周围大气压局部偏差的推导解
程序设定
鼠标控件的键映射。 应用程序的全局设置。
跟随凸轮
专注于模型的移动部分
刷新
刷新动画和曲线以获取更新结果。
保存并加载
保存当前状态以供应用。
干扰
通过检查干扰来显示最小距离和点数。
后处理器API
与用户的支持接口或通信协议。
三、更改属性类型
在属性对话框中添加了一个用于切换类型的新选项,以便您可以通过该选项以及实体类型来更改关节类型。 这些变化适用于关节,力和接触。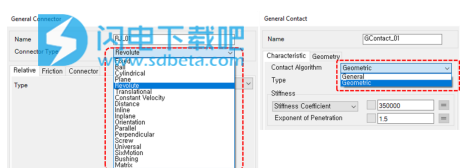
四、六个动作
已经开发了一个完全通用的元素,称为“六运动”。 您可以通过以6方向方式定义运动来控制特定的身体。 在创建力或关节后,只能通过更改类型来创建SixMotion实体。
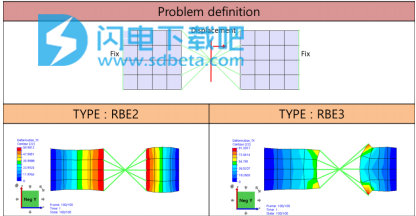
五、力分配元件
已经开发了新的力分配元件。 刚体元素(RBE)是通过将每个节点固定在一起而连接每个节点的唯一可用元素。 它也用于与刚体连接。 但是“固定”约束有时会超出连接之类的螺栓所需的刚度。
为了更精确地表示局部行为,应该分配施加在位于相邻面上的节点上的力或扭矩。 RBE3类型的节点集适用于此目的。
它仅在从预处理器内部生成的Nodeset上可用,而不是导入的。 可以在“节点集”属性对话框中选择元素类型
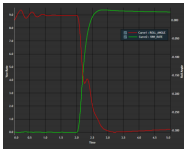
六、稳定时间
已经开发了“稳定时间”功能。 对于需要较大位移和变形的系统,它可以最大程度地减少求解时间以获得静态平衡位置。 该功能对于在预加载条件下查找链条/皮带系统的初始状态非常有用,该条件通常在提高RPM或平移速度之前使用。
该算法经过优化,可以找到较大步长的位置,并且假定稳定时间内的解不具有物理意义。
这些选项在高级选项的“动态”选项卡中可用。
七、
CVT设计器(仅限链式)
长期以来,已经通过一系列项目研究,开发和改进了CVT(连续变速传动)仿真模型。在这段时间里,为了获得更好的性能和解决方案,已经进行了许多试验。在此版本中,开发了一种由最新的CVT建模技术和仿真方法构成的CVT设计器。
这项新技术使CVT设计人员能够快速,轻松地获得与操作环境相关的最有价值的特性。同样,基于多体动力学的仿真方法具有独特的CVT动态行为,而这种行为仅在柔性体中可用。
一个新的设计器由Pin,皮带轮,连接器建模器组成,这些都可以在Links工具包中找到。通过结合CPlacing功能,您可以比以往更快地获得可靠的完整CVT模型。
1、概念
最新的CVT建模技术基于以下假设:刚性连接器的柔顺特性可以代表小的变形。新的求解技术的概念已经在多个会议上发布,并且在许多应用领域中也证明了这种方法的可靠性。
所有的常规输出和后处理器功能对于调查和评估目标系统将非常有用。最重要的是,仅适用于CVT系统的其他专用输出对于同一目的非常有用。
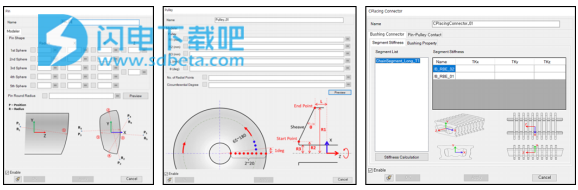
2、造型
开发了三个新的建模器,分别称为“ Pin”,“ Pulley”,“ Cplacing Connector”。 新的建模器大大减少了建立完整CVT模型的操作时间。 建模者会自动生成一个中间模型,以在内部提取必要的依从性模式。 所有必需的实体(例如衬套,带有用户子程序的矢量力)也将以最少的输入自动生成。 这意味着几乎不需要再为获得合规性模式而进行的巨大努力,并且在减少总操作时间方面起着关键作用。
建模者不仅对进行所需的输入和实体有用,而且对于管理输入值也非常有用,因此您可以轻松地进行参数研究。
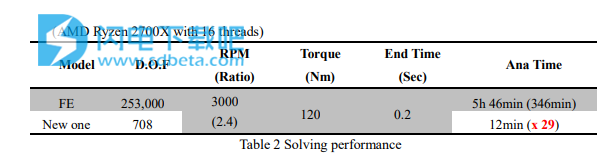
3、解决性能
新的求解技术使您能够在几分钟内获得结果。 与使用灵活的车身动力学的传统方法相比,性能得到了极大的改善。
此外,CVT结果可以与其他类型的模拟(例如静态变形或疲劳分析)关联。 附加仿真的总仿真时间仍然比普通仿真要快。
为了获得NVH特性,还应该将模型与完整的传输系统组装在一起。
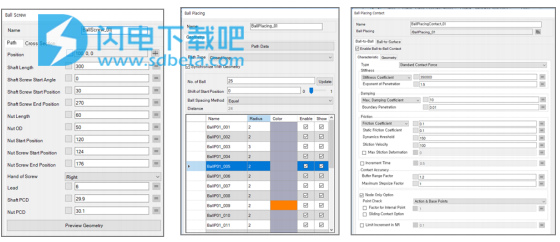
八、滚珠丝杠建模器
1、概念
有许多由滚珠-滚道接触驱动的机构,例如直线导轨和滚珠丝杠等。 它们要求很高的动力传递比,最小的振动,更高的运行精度,这就是为什么要使用滚珠滚道机构。
从仿真的角度来看,滚珠-滚道接触不是一件容易的事,因为它们由于质量小-力连接强,是导致高频系统的关键部分。 为了最小化建模工作并最大化求解性能,滚珠丝杠建模器可能是最佳选择。
链接工具包中提供了这些新工具。
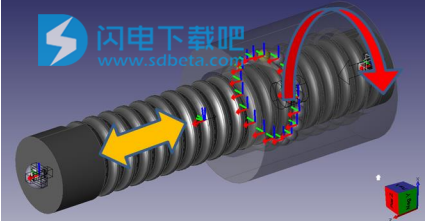
2、造型
滚珠丝杠建模器由“滚珠丝杠”,“滚珠放置”和“滚珠放置触点”组成。“滚珠丝杠”功能生成一个轴和一个螺母体,每个螺母和螺母体都具有内/外滚道几何形状,以引导滚珠 跟随。 “球放置”和“球放置接触”使球道与球之间进行所有必要的接触并有效地进行管理。 不管您要使用多少个球,“ Ball Placing”(球放置)都可以帮助您将球放置在您想要放置的正确位置上。此外,它还允许单独更改每个球的半径,以便您可以估算出贡献 各种输出。
就像另一个“建模者”一样,所有必需的值都可以参数化,以便客户可以将它们作为DOE参数进行各种性能研究。
3、解决性能
许多研究证明,Curve to Sphere接触算法是解决一种球-滚道接触问题的最佳方法。您可以参考每种接触算法的性能比较表。触点对是通过“球放置触点”自动生成的。
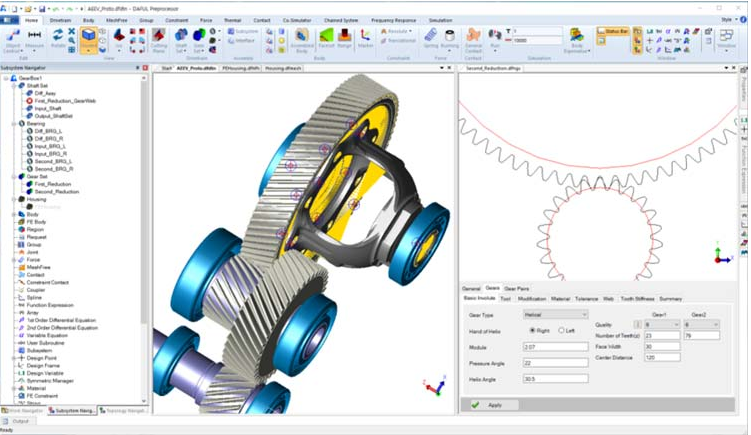
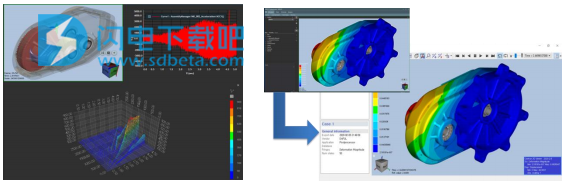
九、RV减速机
RV减速器具有多齿接触特性,具有高抗冲击性和较小的反冲。它广泛用于诸如机器人关节之类的精密传动中。对传动性能有重大影响的主要参数是扭转刚度和传动误差。由于沿着输入输出轴的顺应特性,行星系统的齿以及摆线齿轮通常也需要对齿进行修改。
两对摆线齿轮是最小化或消除系统间隙的关键部件,NVH性能自然比其他齿轮系统高得多。因此,引领全球RV减速器市场的Nabtesco建议了几个重要的性能指标,以评估RV的性能。
新的常规实体已添加到Drivetrain工具箱中,因此您可以获得与目录中描述的性能指标相似的结果,并且与动态仿真的结果非常接近。

1、新实体。
几个实体已添加到Drivetrain工具箱中。当然,这些也可用于其他动力传动系统组件。
a)不带齿圈的行星齿轮
输入轴是行星齿轮的太阳轮,并且将扭矩分离到行星齿轮中。
不同于传统的行星齿轮系统,行星齿轮不连接到齿圈,而只是将旋转运动直接传递到偏心轴。因此,新版本添加了一个选项,以关闭正在使用的齿圈。
b)偏心曲轴
偏心轴是RV减速器的重要组成部分。每个偏心轴均由连接的行星齿轮驱动,并根据其旋转角度沿径向推动摆线齿轮。因此,轴的一转驱动摆线齿轮的小旋转量为1 /(摆线齿轮齿数)* 360度。
轴设计器已经扩展为可制造偏心曲轴。当前版本仅允许每个偏心角的相反位置(180度)。偏心可以是
在设计人员中定义您所希望的。

c)销式摆线针轮
已经开发出与气缸接触的销式摆线齿轮。 在RV减速器中,每个气缸都安装在壳体内部,并引导摆线齿轮平稳旋转。 当前版本不支持配置文件生成,而仅允许使用导入的配置文件。

d)RV减速机建模器
RV减速器建模器可帮助您轻松组装所有组件。 系统需要基于偏心轴的重复实体。 一旦为一个轴生成了轴承,建模者就会将其复制为另外两个轴,然后组装到正确的位置。 同样,摆线齿轮以及行星齿轮的初始位置将通过建模器自动设置。
十、用户定义的模态有限元
为了使用有限元实体,您应该导入有限元网格数据,并且只有Ansys和NASTRAN格式可用。 对于其他想要使用自己的网格以及特征值结果的客户,已经开发了一种特殊的ASCII文件格式。
如果具有网格数据和特征值结果的ASCII文件遵循很容易理解的规则,也可以导入。 使用格式创建输入文件后,就可以使用自己的模型和结果,即使它来自其他FE软件也是如此。

使用帮助
一、在项目中添加ANSYS Motion预定义头文件
如何在项目中添加ANSYS Motion预定义头文件。
1、复制defusub.h文件并将其粘贴到项目文件夹中
将“ Usersubroutine.zip”文件从“ ANSYS安装路径\ Motion \ Document \”复制并解压缩到用户目录。 并将defusub.h文件复制并粘贴到“ \ Usersubroutine \ Code \”文件夹中到项目文件夹。
2、添加defusub.h文件
单击鼠标右键和现有项。
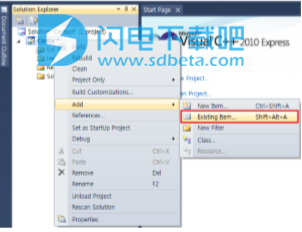
<现有项目的添加>
单击defusub.h文件,然后单击添加按钮。
在解决方案资源管理器中双击添加的defusub.h后,检查内容。
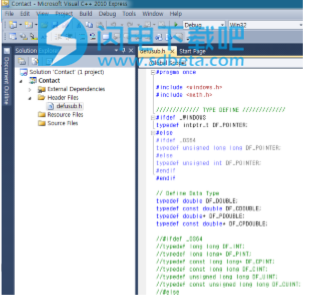
<添加了defusub.h>
二、如何创建用户子程序功能
解释如何创建用户子例程功能
1、创建Contact.cpp文件
单击项目的鼠标右键。 选择添加选择新项目。
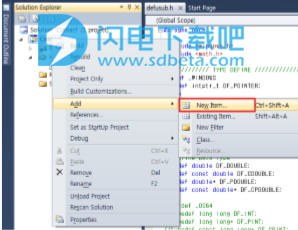
<添加新项目>
单击代码C ++文件名称(联系方式)添加
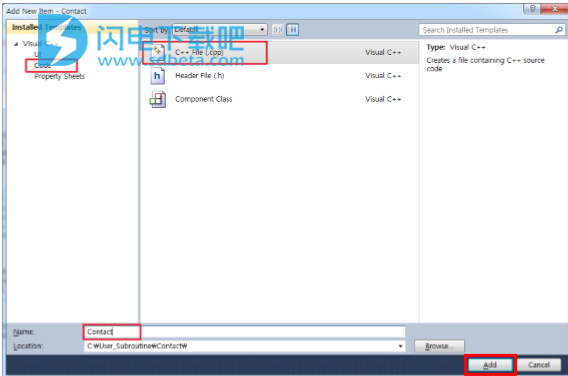
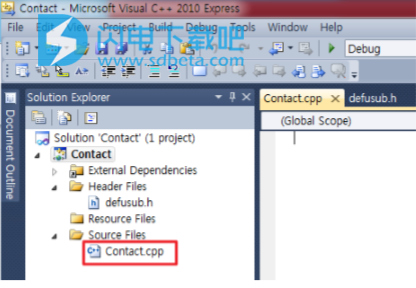
<添加Contact.cpp>
检查Contact.cpp。
三、确认创建的dll文件并添加到求解器文件夹
说明创建* .dll文件后如何添加到求解器文件夹中的* .dll文件。
1、确认创建Contact.dll文件
配置管理器中的Selcet版本。
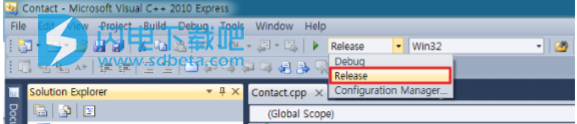
<修改配置管理器>
单击顶部菜单中的Build Solution单击Rebuild Solution构建项目
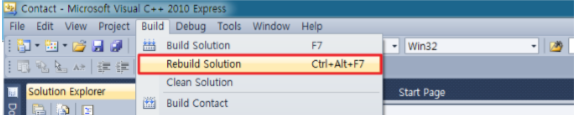
<构建解决方案>
检查解决方案的类型,然后移至低等级的“释放”文件夹。 确认创建的Contact.dll文件。
2、在求解器文件夹中添加到Contact.dll
如下所示,将contactbll文件复制并粘贴到求解器文件夹中。 (ANSYS Motion安装路径\ Motion \ Solver \ Windowns)
四、创建模型和分析
说明如何创建接触力模型和应用用户子例程。 并分析接触力7.1。 创建接触力模型
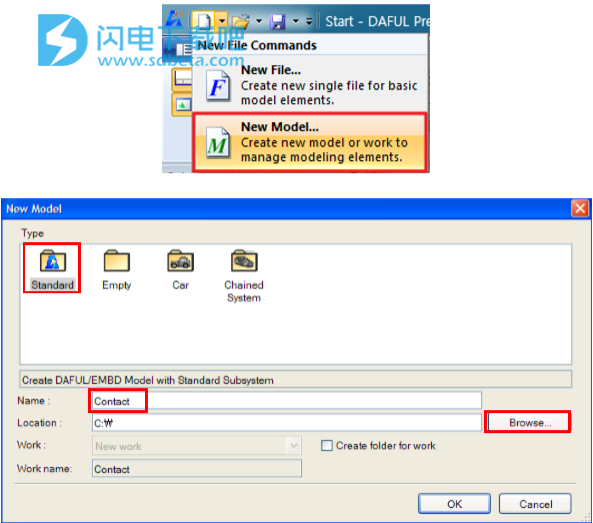
运行ANSYSMotion菜单创建新模型选择标准EMBD模型并输入名称。 单击确定。
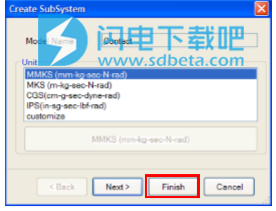
单击完成。
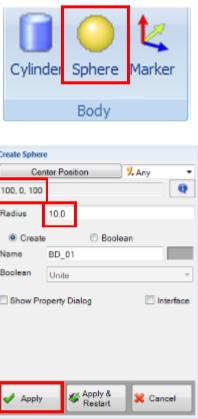
在(100,0,100)点创建一个球体。 半径为10。
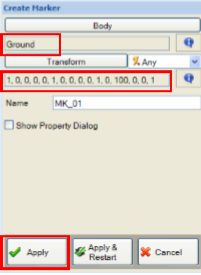
在(100,0,0)点创建地面标记。
创建矢量力。 基体为地面,动作体为球体(BD_01)。 动作标记是BD_01 / CM的基本标记,基本标记是Ground / MK_01的标记。 创建矢量力时,请参考下表。











