
��װ�ƽ�̳�
1���ڱ�վ���ز���ѹ���õ�Tecnomatix.Plant.Simulation.14.2.Win64.iso��װ�����ļ���_SolidSQUAD_�ƽ��ļ���
2��������_SolidSQUAD_�ƽ��ļ������ҵ�SolidSQUAD License Servers������ļ��зdz���Ҫ���������Ƶ���װĿ¼�У�Ȼ�����Ա��������install.bat����ͼ��ʾ

3��Ȼ�����ǿ�ʼ��װ�������壬����Tecnomatix.Plant.Simulation.14.2.Win64.iso��װ�����ļ���˫��setup.exe���а�װ����ͼ��ʾ��ѡ���һ��Install Tecnomatix Plant Simulation 14.2 Setup

4���Ե�Ƭ��

5�����next

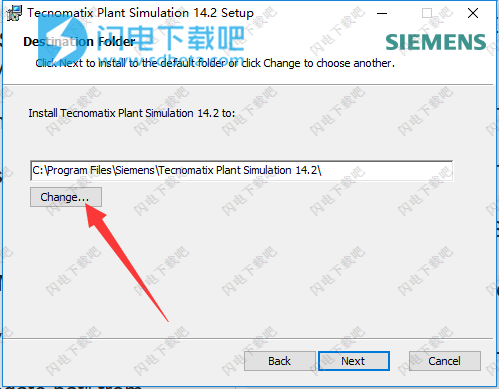
6�����changeѡ��������װ·�������next
7�����install��װ

8����װ�У�������ĵȴ�����

9����װ��ɣ����finish�˳���
10���Ȳ�Ҫ������������ͼ��ʾ�����ƽ��ļ����е�Tecnomatix Plant Simulation 14.2�ļ��и��Ƶ�������װĿ¼�У�����滻Ŀ���е��ļ�

11�����������ƽ���ɣ��dz���
�°����
1��ֲ��ģ��14.x����Ҫ�仯
������TecnomatixPlantSimulation14.x��������Ҫ���ġ���ˣ�������TecnomatixPlantSimulation14.x�д�����ʱ���������������ǰ�汾��TecnomatixPlantSimulation�д����ķ���ģ�͡�
ֲ��ģ�����Ҫ�仯14.2
•���ǽ�ѡ�Poses��Joint���ӵ�3D�����С���ؽ�һ�������Զ���ؽ��˶�ѧ��
•���ǽ���ѡ��������ӵ�ѡ����������ڴ��������У����ǽ�Exit����>Carry���ֵ����ô�ѡ�Exit��������ѡ�����Щ���ý�ȡ���˳�����>Я��������
���ʹ��ExitStrategy���Բ�ѯ�˳����ԣ���ֵ���ٴ��ڡ���ˣ�������ʹ������TransportImp.Active���IJ�ѯ�˷���ֵ��ģ�͡�
ע��
�����û�н�MUĿ�����뵽���䵼�����У�Ҳû�н�Ŀ�����뵽�����У���ö���ʹ�ò�����ȷ��Ŀ�꣬����ѡ�Exit�������Ŀ�ꡣ
•�������ƻ���������е�ij��������ʱ�����Ǹ�����PlantSimulation�����ظ����������λ�á������ڿ�����UserObjects�ļ������ҵ����ࡣ
������ģ��ʱ����ģ�����ڳ�Ϊģ�͡�
UserObjects�ļ����е�ʾ��������ڳ�ΪMyFrame��Ĭ������£���������ڽӿڣ����ʹ�������վ�ͳ��ڽӿڡ�
•���Ǹ�����������Ϣ����������ơ����ڣ��б�������������������͵�������ƥ�䡣
2��ģ��Ͷ�����صı仯
2��ģ��Ͷ�����صı仯
������TecnomatixPlantSimulation14.x�н�������ģ��Ͷ�����صĸ��ġ���ˣ�������TecnomatixPlantSimulation14.x�д�����ʱ���������������ǰ�汾��TecnomatixPlantSimulation�д����ķ���ģ�͡�
ģ��Ͷ�����ص�ֲ��ģ��仯14.2
•ʹ��Pull�ؼ�ʱ�����Ǹ�����PlantSimulation����Ϊ���MU��@������ָ�����֣�MU�����������ֵʱ��Ч��
•����MSExcel�ļ�ʱ���������������PlantSimulation�����ܡ��������ڱ���ǰ�켸�ٱ���Ϊ�ˣ����Ǵ�Excel����ԭʼֵ��ת��PlantSimulation���������ݡ������ڵ������������ַ�������ʱ��������PlantSimulation������ת����ֵ��PlantSimulation��ʽ������Excel�����õĸ�ʽ��ƥ�䡣
ģ��Ͷ�����ص�ֲ��ģ��仯14.1
•�ڼ���CheckMUDistance�¼�ʱ����������ȵ������ȷ�ԡ�����ܻ�Ӱ��ģ���������������������ռ���ʣ��Լ���ʱ����ͬʱ�����������¼������ǵ����������ȴ�����Щ�¼��е���һ��ʱ��
•�ڼ��㰼�¼�ʱ����������ȵ������ȷ�ԡ�������ͬʱ�����������¼��Լ���ʱ�������ȴ�����Щ�¼��е���һ��ʱ�����Ӱ��ģ������
�¹��ܽ���
•���ǽ�ѡ�·�����ӵ�����������С���Щ���Զ��ҵ����ǵ�Ŀ�ĵ��ڴ��ʹ����ƶ���
���ǽ��˵�����RoutetoDestination���ӵ�Part��Container��
•���ǽ�����DestinationWasReached���ӵ��ƶ�����
•�����ڶ���Station��ParallelStation��AssemblyStation��DismantleStation��Drain���������Զ�������ѡ����������Щ�����Ƿ�������ʼ��������MU��
•���ǽ���ѡ����PredecessorNumber���ӵ�MU�ķ��������С���MU����ȫ�ʺ����ȵĶ���ʱ��������ǰһ����������
•���ǽ���ѡ����ConveyingDirection���ӵ�MU�ķ��������С�������MU���ڶ����ϲ���ķ���
��Ҳ��������-1��Ϊλ�á�Ȼ�����MU��ʹ��Ԥ����λ��λ��0����MU�����ƶ�ʱλ�ڶ����ĩ�ˡ�
•������չ��PickAndPlaceRobot�ķ���setDestination�������ڻ����Խ�������ָ��ΪĿ���������setDestination��Conveyor.sensorID��1������
�����˵ĽǶȱ����ڻ��������������еĴ��ʹ��ϰ���������������Conveyor.sensorID��1�������Ҫ�ڴ��ʹ������ö���Ƕȣ���dz����á�
•���ǽ�����Location���ӵ��������С�������ʹ��������ѯ���������ڵĶ���
•���Ǹı��˷���outIn����Ϊ��ָ��MyPart.outIn��-1�����ٵ��´��ö���ͨ���䴦��ʱ��ȷ��MU�˳���ʱ�䡣ͨ����ͳ����Ϣ���Ὣ��ʱ���Ϊ����ʱ�䣬������Ϊ��ѡ����WorkOnFinishedPartAgainָ��true��
ʹ�ð���
�����߰����У�����ʹ������Լ����
•�ڰ���ҳ�����ı��������У�����������Դ�д��ĸ��ͷ����б����ʾ������ParallelStation��Station�ȡ������������У�б��������ʱ��ָ���������ӣ�����ParallelStation��
•����������Сд��ĸ��ͷ��֮���ÿ���±���ʽ���Դ�д��ĸ���ϵ͵��շ尸������ͷ��������б���ʾ������absSimTime��dataTypeColumnIndex�ȡ������������У�б��������ʱ�Ƿ��������ӣ�����absSimTime��
•���������Դ�д��ĸ��ͷ��֮���ÿ���±���ʽ���Դ�д��ĸ���ϲ��շ尸������ͷ��������б����ʾ������CreationTableActive��ReferenceTime�ȡ������������У�б��������ʱ�����Ե����ӣ�����CreationtableActive�����������������������д����⡣
•���������Ե�����������б���ʾ�������������ַ���������ֵ�ȡ�
•ͨ��ѡ��һϵ�в���������ʱ������ʹ������Լ�����ļ�>ģ������/��ѡ��>ģ��>�����������Ҫ���ø��ʷֲ����������������ѡ��“�ļ�”�˵���ѡ��“ģ������/��ѡ��”��������ĶԻ����е�“ģ��”ѡ���ת��“���������”�ı��������֡�
•�����������“�ر�ģ��”��“�Ի�����”������ʹ�ô��塣
•���������������������Method��������ʹ�õȿ�����Courier��
•��ɫ�����ǽ������ã�����ӿڵĶԻ����ڡ�
���ĵ�ַ��http://www.sd124.com/article/2018/0818/225057.html
��Siemens Tecnomatix Plant Simulation14.2���ذ�װѧϰͼ�Ľ̡̳����������ذ���������������ӭת�أ�
��ص�������
�����ȵ�
�����ȵ�