
安装破解教程
1、在本站下载并解压,如图所示,得到install安装文件夹和keygen注册机文件夹
2、首先我们来安装软件,在install安装文件夹中双击3DReshaper18_0_8_28954Main_x64.exe运行,语言选择简体中文

3、进入软件安装向导,如图所示,点击下一步

4、许可协议,勾选我接受协议,点击下一步

5、点击浏览选择软件安装路径,点击下一步

6、选择安装功能组件,点击下一步

7、选择安装附加任务,点击下一步

8、确认安装信息并点击下一步
9、软件安装中,大家耐心等待一会儿

10、安装完成,去勾选运行软件选项,退出向导

11、不要运行软件,将keygen文件夹下的3DRshp_Loader.exe复制到软件安装目录中,双击运行,如图所示,点击OK,I accept the agreement‘’

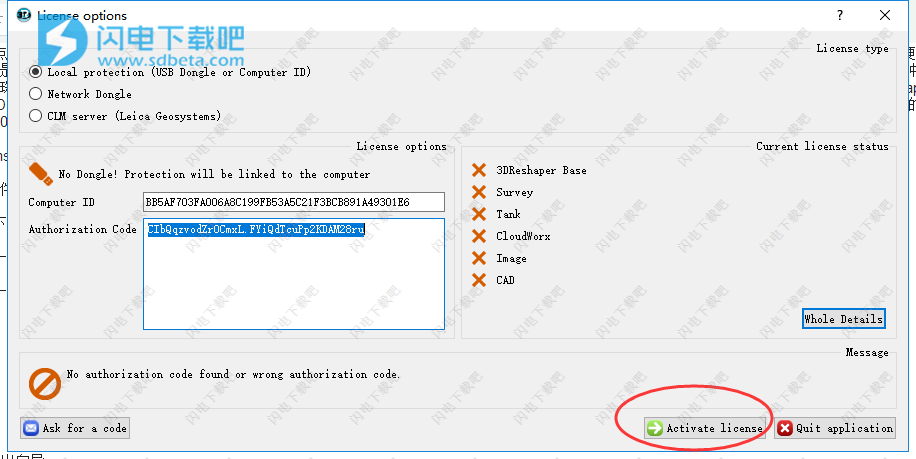
12、回到安装包中,如图所示,运行Technodigit_3DReshaper_2017_Calc.exe,如图所示,将computer id复制到注册机中,点击回车键,将自动生成授权码

13、如图所示,将注册机生成的Authorization code授权码复制到软件中,

14、点击右下角的Activate license按钮
15、激活成功,如图所示

16、点击右下角的Launch application启动程序,稍等一会儿

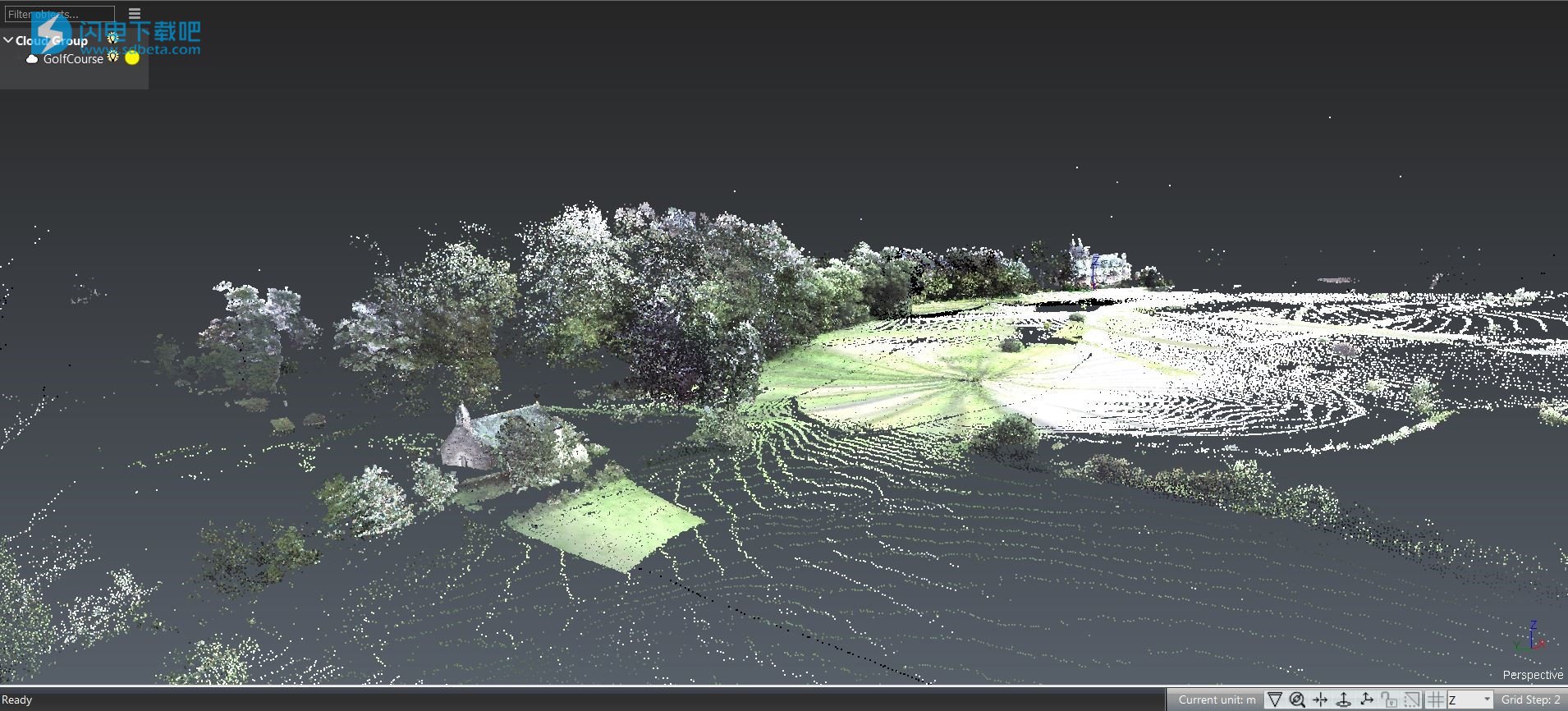
17、软件运行界面如图所示

使用帮助
点云过滤
1、熟悉点云的各个方面
使用鼠标滚轮放大模型。
用鼠标滚轮上的压力平移并移动鼠标。
使用鼠标右键上的压力旋转模型并移动鼠标。
使用鼠标左键选择点云
使用ESC键上的压力重置选择。
单击鼠标右键显示上下文菜单。
您可以更改点云的表示模式:
流畅的表现。
平面表示。
检查代表。在这种情况下,影响每个点的颜色取决于测量装置测量该点的强度水平。请注意,可以使用“测量\编辑颜色”命令调整颜色。
真彩色表示。在这种情况下,特定颜色会影响每个点,就像点云是3D图片(RGB颜色)一样。
根据变焦系数进行显示,以便查看相机框架中的点。如果您的放大率很高,并且您处于静态视图(释放右键),您将看到云的所有点。如果您的放大率很低,应用程序将不会显示所有点以避免图形板饱和。
您可以看到的最大点数由Home\Colors和Aspect命令设置。您有时可能需要更改此参数,但是,大多数情况下,默认值可正常工作,因为软件会自动调整显示的点数。

2、更改3D点云(和其他对象)的视图
你可以从:
一个正投影视图。在这种情况下,你总是在物体前面,因为你是从无穷远处看。刻度仅以正交绘制,因为在此模式下屏幕上的每个深度和区域的像素距离相同。
甲透视图。在这种情况下,视图类似于您用眼睛看到的视图,因为相机位于3D环境中。靠近你眼睛的物体更大,而远处的物体则更小。您也可以在对象内移动。
使用位于图形区域右下角的图标在正交视图和透视视图之间进行切换。
当您在此高尔夫球场中的横向视图中工作时,激活参考矢量可能是相关的,以便3-D场景的垂直轴对应于Z轴。看到垂直头部的景观然后Z轴从底部到顶部看起来更自然。视图的这一方面对于机械设计不太重要。
3、手动清理或拆分云
选择点云
启动Cloud\Clean/Separate

在图片上绘制一个轮廓,以消除场景周围的错误点。请注意,在轮廓绘制期间,视图已锁定且无法旋转。
按ENTER确认轮廓,在视图方向上将其视为拉伸轮廓。
您现在可以再次旋转3D视图。
4、根据方向着色云
选择点云。
沿一个方向选择Measure\Color命令。
选择所需的方向,这里是Z.
单击预览。然后,如果要更改颜色,请单击“编辑颜色”,拖动箭头或输入精确值作为阈值。可以设置多个级别来获得固定颜色而不是平滑的颜色变化。
单击确定以进行验证。
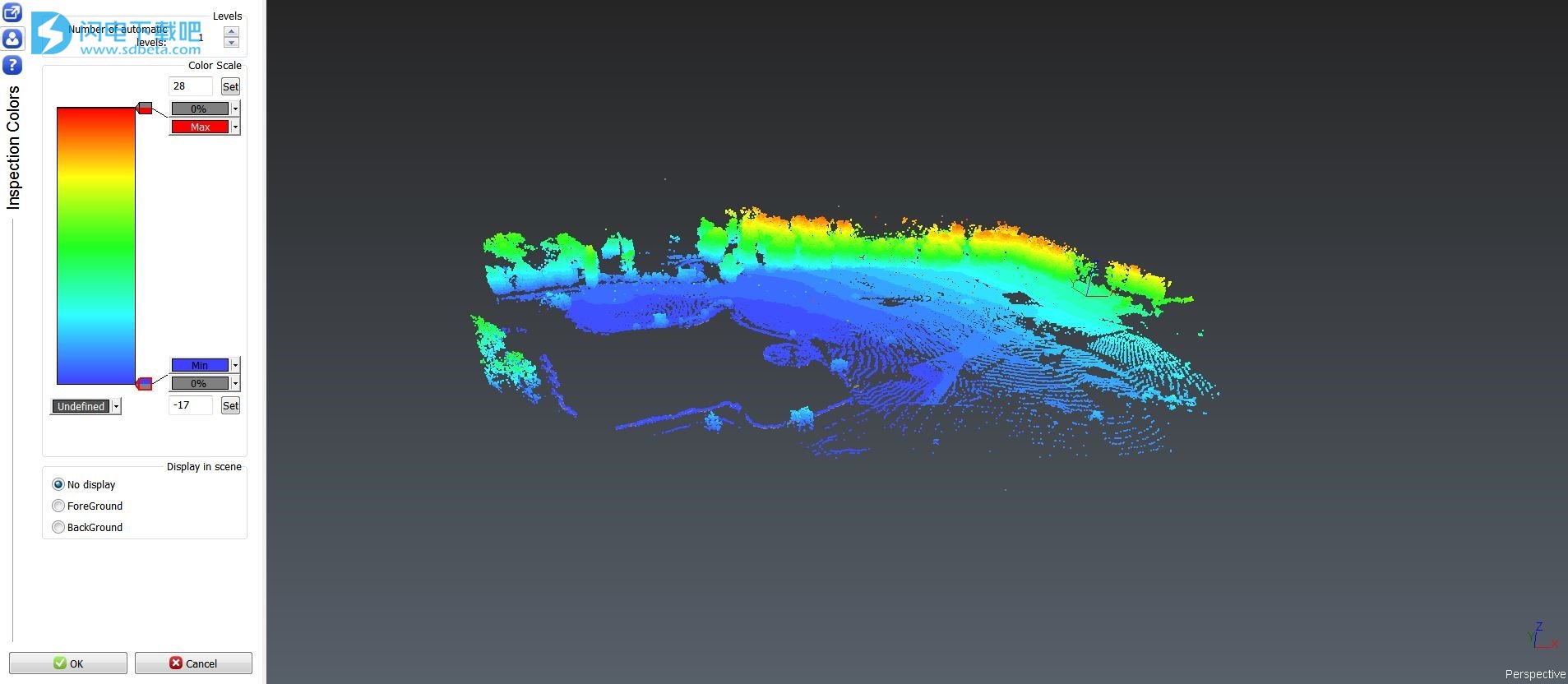
沿Z轴的渐变颜色

点云中设置的两个级别
这种彩色云可用于使用命令Cloud \ Inspection Colors将云分成两部分。但是,在本教程中,我们将使用另一种方法进行爆炸。
5、自动清理或拆分云(以小块方式爆炸云)
沿Z轴的渐变颜色
点云中设置的两个级别
这种彩色云可用于使用命令Cloud \ Inspection Colors将云分成两部分。但是,在本教程中,我们将使用另一种方法进行爆炸。
5、自动清理或拆分云(以小块方式爆炸云)
选择点云。
启动Cloud\Distance。
输入例如0.5。
这意味着软件将尝试根据点之间的最大距离或云之间的最小距离0.5(如果数字化以米为单位,以米为单位)来分割云。

根据距离将云块分成小块
根据距离将云块分成小块
命令根据点数自动对子云进行排序,并仅保留1000个最大的云。您可以在对象资源管理器中看到所有这些对象,从最大到最小的点数排序
现在,您可以选择与GolfCourse12相对应的小教堂。
在图形场景中,使用右键单击仅显示教堂(仅显示)。或者在树中,单击灯泡+Ctrl键以显示对象。


6、创建一个3D网格
选择教堂(对应云“GolfCourse 1 2”)。
启动Mesh \ 3D Mesh。
在高级参数中,可以使用一个选项来对所有点进行网格划分(仅适用于少于400 000个点)。只有在云不包含太多噪声点或测量误差的情况下,对所有信息进行网格划分才能保持数字化的所有信息。由于三角形数量较多,此过程也会导致网格较重(请参阅网格划分练习)。
选项尝试仅保留外部边框使您可以自动填充一定数量的孔。
教堂的最终3D模型
使用Ctrl + Z撤消。
提取地面,
选择云。
启动测量\提取地面。
该命令的目标是自动提取并网格化地面上的点。请参阅专用于此功能的相关练习

自动地面点提取和3D网格划分
选择云GolfCourse和先前提取的网格。
使用\ Object启动Cloud \ Separate。

将对象的给定距离处的点分开(此处为网格)
还可以根据预先提取或创建的对象(折线,几何形状或网格)自动分离云。这个可能性在本练习中没有详述(您可以尝试使用菜单Construct的命令)。
将对象的给定距离处的点分开(此处为网格)
还可以根据预先提取或创建的对象(折线,几何形状或网格)自动分离云。这个可能性在本练习中没有详述(您可以尝试使用菜单Construct的命令)。
本文地址:http://www.sd124.com/article/2018/1210/227441.html
《Technodigit 3DReshaper (Meteor)2018 v18.0.8下载安装学习图文教程》由闪电下载吧整理并发布,欢迎转载!