
安装破解教程
1、在本站下载并解压,首先我们来安装软件,在Install文件夹中找到SetupLauncher.exe双击运行,点击next

2、如图所示,许可协议,点击 I agree我接受
3、如图所示,选择安装用户,这个默认即可点击next
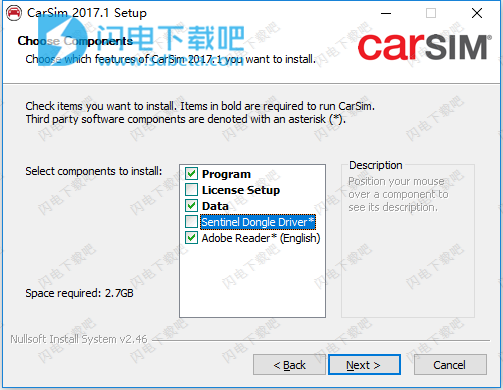
4、选择安装功能组件,如图所示,这里需要取消“License Setup”和“Sentinel Drivers”两个选项,点击next
5、如图所示,点击浏览选择软件安装路径,点击next,不想更改的朋友也可以使用默认路径C:\Program Files (x86)\CarSim2017.1_Prog
6、继续点击next
7、请选择安装用户数据文件的位置。为了防止覆盖用户数据,您必须选择一个空的目标文件夹,点击next
8、如图所示,勾选安装快捷方式,点击install安装
9、软件安装中,耐心等待即可
10、软件安装完成点击“Finish”退出向导

11、回到安装包中,打开Crack文件夹,我们找到SolidSQUADLoaderEnabler.reg注册表文件,双击运行,添加注册表,点击确定-是
12、回到安装包中,如图所示,将Crack文件夹中的madlic_SSQ.dat和MSCLIC_SSQ.dat两个文件复制到C盘根目录下,
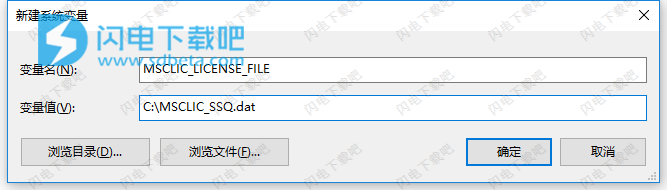
13、然后我们来添加系统变量,具体操作为打开系统属性——点击“高级系统设置”选项——点击“环境变量”选项——点击系统变量下方的“新建”按钮,如图所示,我们
变量名:MSCLIC_LICENSE_FILE
变量值:C:\MSCLIC_SSQ.dat
变量名:MSCLIC_LICENSE_FILE
变量值:C:\MSCLIC_SSQ.dat
14、然后现在我们再创建一个系统变量,如下图所示:
变量名:MADLIC_LICENSE_FILE
在变量值:C:\madlic_SSQ.dat,
变量名:MADLIC_LICENSE_FILE
在变量值:C:\madlic_SSQ.dat,
15、以上操作完成后我们回到Crack文件夹,将CarSim2017.1_Prog文件复制到CarSim 2017.1软件安装目录中,点击替换目标中的文件,默认安装路径C:\Program Files (x86)
16、现在我们运行软件,如图所示
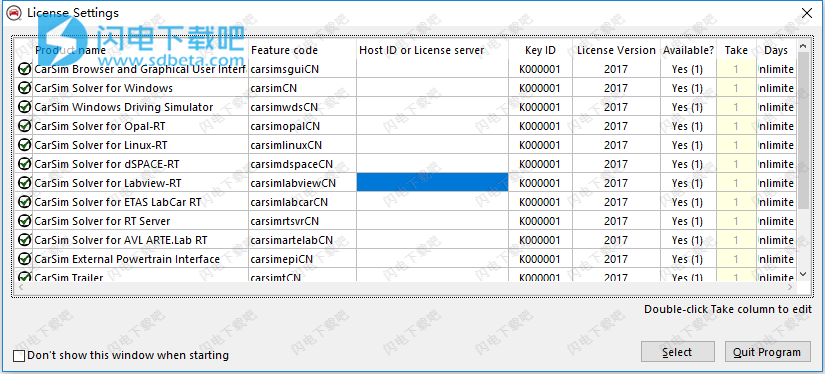
17、我们选择所需的产品,然后点击“Select”即可,如下图所示:
17、我们选择所需的产品,然后点击“Select”即可,如下图所示:
18、如果CarSim 2017.1软件无法正常启动,请先将madlic_SSQ.dat文件复制到桌面上,右键选择记事本打开,我们将里面的日期“31-dec-2019”全部替换为“31-dec-2020”即可
使用说明
CarSim数学模型
车辆数学模型
1、可配置的表格功能
·使用VS可配置函数定义独立变量和因变量之间的潜在非连接关系,这些函数在运行时设置使用:o常量o Lincar系数oNonlincar表,其中包含一个涉及一个或两个独立变量的插值方法o涉及其他变量的代数公式
·当选择线性系数或线性插值mcthods时,模拟可以更快地运行。
·没有对表长度的内置限制。
·可以转换独立和依赖变量以支持标准化函数。
2、VS参考路径
·最多200个VS参考路径,具有一系列段(直线,弧形,回旋曲线,X-Y表)。
·参考路径用于驾驶员控制,交通车辆和道路定义。
3、司机控制
·可以使用内置模型选项指定所有驱动程序控件,该选项由运行时使用VS命令添加的cquations定义,或从其他软件导入。
·内置驱动程序模型可以转向跟随目标路径,目标路径可以在运行期间更改。
·闭环速度控制器基于目标速度和补偿限制,目标路径的曲率和3D道路几何形状(坡度,坡度,曲率)。
·换档和离合器控制可通过换档时间表和自动油门 - 离合器相互作用来处理。
·可以组合闭环和开环控制来模拟干预系统。
·开环转向可以是角度或扭矩。
·开环制动可以是踏板力或流体压力。
4、3D道路几何与摩擦
·支持多达100个路面,每个路面都有自己的参考路径。
·垂直高程添加了几个组件,每个组件都指定为路径S(站)和L的函数
(横向偏移)坐标。
·道路可以有不同的宽度,可以高效地描述复杂的几何形状。
·包括道路轮廓,无论走到哪里都“漫游”以跟随车辆。这提供了高频测量的道路粗糙度数据的有效使用。
·相对于参考路径指定摩擦力,具有站点和横向距离的可变宽度函数。
·道路几何可以从其他软件导入,也可以在运行时添加的公式定义。
·VS API包括提供访问权限的功能
用于模型扩展或附加输出的用户提供的等式的3D道路几何。
5、车辆配置
·CarSim拖车包括一个带有一个或两个悬架的拖车,具有负载分担效果。需要一个可选的许可证来包括拖车。·簧载质量可以是简单的刚体,或者包括扭转柔量的框架导轨。扭转符合性需要可选的许可证。
·CarSim包括一个选项,包括由于安装符合性引起的发动机运动的额外多体自由度(DOF)。需要可选的许可证。
6、风和空气动力学效应
·六个空气动力和力矩应用于悬挂质量(如果有拖车,则两个弹簧质量)。
·这些力和力矩是空气动力学滑动,俯仰和行驶高度的可配置功能。
·可以使用表格,运行时方程式或从其他软件导入来设置环境风速和航向。
7、悬挂
·悬架可以是通用的或实心轴。 通用悬架指定两侧都有颠簸的车轮运动,可能还有联轴器。 它们可以代表独立的和扭曲梁悬架。
·悬架无需转向,或者包括用于车轮倾斜转向轴的全3D运动。
·悬架模型具有完全非线性运动行为并且是不对称的
·悬架弹簧和阻尼器是非线性的,包括由于摩擦引起的滞后现象。
·每个悬架都具有横向和纵向的顺应性,并且每个车轮都具有前束和外倾顺应性效果。
·所有符合性都可以用线性系数或非线性可配置函数表示。
·包括用于碰撞停止的单独力。
·悬架力矩包括非线性辅助侧倾力矩和线性系数侧倾阻尼器。
8、转向系统
·悬架,转向,轮胎和地面之间的相互作用通过使用倾斜主销轴的详细多体模型来处理。
·转向模型包括齿轮齿条和循环球型系统的具体细节。
·每个车轮的转向角可以在K&C钻机(在簧载质量坐标系中)中测量,也可以围绕主销轴旋转。
·转向系统包括手动或动态动力提升的详细选项,包括柱辅助。
·转向系统包括滞后,顺应性,惯性和阻尼。
·特殊方程用于低速条件,以模拟地面摩擦转向扭矩。
9、刹车系统
·可以通过踏板力(有或没有增压)或主缸压力来设定制动控制。
·来自主缸的控制输入压力与每个车轮端制动执行器成比例。
·制动扭矩建模为执行器压力和热效应的非线性函数。
·制动系统有多种选择,可通过Simulink等外部程序或使用简单的内置控制器提供ABS控制。
·特殊方程处理车轮锁定,以获得正确的反作用力矩,避免数值不稳定。
10、轮胎
·CarSim包括几种轮胎模型。它已经准备好运行一个完全不对称的基于表格的模型,一个扩展模型(更多的曲面效果表),Pacejka 5.2
神奇公式的版本,以及TASS / TNO的MF-Tire。
·CarSim与TASS / TNO的MF-Swift和COSIN的FTire一起运行(分别需要TASS和COSIN的额外许可才能使用他们的模型)。
·不同的型号可以应用于同一车辆的不同车轮。
·内置模型使用非线性表来确定侧向力,纵向力,对齐力矩和倾覆力矩,作为滑动,载荷和拱形的函数。
·使用相似性处理可变摩擦条件,以保持轮胎的线性和极限特性。
单独的系数用于X和Y分量。
·使用松弛长度包括轧制的瞬态效应。松弛长度可以是恒定的或定义为垂直力和滑移的非线性函数。
·特殊方程用于在极低速度和极高速度下保持真实的轮胎瞬态特性。
·外部轮胎型号可以在地面接触点或车轮中心施加力。
·可以用一到四个点来处理轮胎接触以考虑接触面积尺寸,其可以被定义为轮胎压缩的非线性函数。
·双轮胎可用于所有车轮。
11、动力总成
·CarSim拥有详细的动力总成模型,用于前轮驱动,后轮驱动和四轮驱动(全轮驱动)。还有一种用于速度控制的最小模型,其中扭矩直接施加到车轮上。
·发动机扭矩由油门输入和曲轴角速度的可配置功能定义。
·燃油消耗由2D表定义。
·发动机通过液力变矩器或机械离合器向变速器提供扭矩。
·变速箱根据当前档位选择转换扭矩和速度,旋转惯性和效率取决于档位选择。
·支持无级变速器(CVT)。
·变速器的扭矩变为前轮驱动系统或后轮驱动系统的差速器。 对于四轮驱动系统,变速器通过扭矩偏置将扭矩施加到中央单元(例如,分动箱)。
·中心单元和差分模型类似。 所有都有四种型号选择:
1.始终锁定。
2.粘性耦合。
3.使用离合器进行联轴器。 离合器可以在外部控制或使用内置逻辑控制。
4.偏航控制差速系统,包括两个离合器,减速齿轮在差速器上并联。 该系统允许控制左右和前后之间的扭矩分配。
·中心单元具有非锁定选项的扭矩偏置。
·双离合器是轴差速器的替代品。该系统包括位于轴中间的齿轮箱和每个车轮与变速箱之间的两个离合器。
·动力传动系统的扭转顺应性可以通过固有频率和阻尼比来表征。
·CarSim提供与AVL Cruise商业工具的紧密低级集成。 CarSim和AVL-Cruise中的GUI支持自动连接。使用Cruise界面需要可选许可证。
12、传感器和交通
·这些模型包括几种虚拟传感器,可以检测各种类型的车辆运动,包括前方道路的加速度,速度和预览。
·最多可添加200个移动对象,这些对象会自动更新,以将简单的基于道路的命令转换为完整的3D几何体。这些物体可以在远期运行中回收,在它们离开视线后重新出现。
·对象的运动可以是常量,通过指定速度,使用代数方程设置或从第三方软件导入来设置。
·基于速度移动的物体支持偏离轨迹,在交叉点产生逼真的低速交通转弯。
·可以包含多达99个范围和检测传感器,用于检测移动物体。使用传感器功能需要可选许可证。
·每次检测包括22个可以导出到外部控制器的变量(例如,ADAS)。
·对象可以相互阻塞(遮挡)。传感器检测变量仅响应视野内的对象部分。
二 、求解器程序输入和输出
CarSim使用标准VS库例程来处理输入文件,执行标准计算和生成输出文件。
1、输入数据文件
·CarSim从通常自动生成的文本文件中读取所有输入。 这些文件也可以在外部用于高级应用程序。
·CarSim的输入文件遵循一种简单的基于关键字的格式,称为Parsfile。 CarSim在处理输入文件时可以识别数千个关键字。
·Parsfiles对于软件的读写非常有效,同时也易于人们阅读和编辑。
·每个输入行可以选择为参数指定备用单位。
·可以使用数字,数字表达式(例如1/16)或涉及其他模型变量的符号代数表达式将值直接分配给模型参数。
·CarSim在运行时处理VS命令,定义新变量,向模型添加方程,更改变量单位,以及扩展原始CarSim模型以满足自定义要求。
·Parsfiles支持INCLUDE功能,允许高级应用程序,如实验设计
(DOE),灵敏度和定制的自动化方法。
2、输出变量
·CarSim可生成600到数千个内置输出变量,具体取决于是否有拖车,传感器,交通车辆等。
·运行时使用的命令根据需要添加运动输出集,驱动程序预览点和其他输出。
·可以在运行时指定可用输出的子集 -
时间,控制输出文件的大小和组织。
·可以在运行期间启用和禁用写入文件,以便仅保存长模拟中的有趣结果。
·可以在运行时定义新的输出变量。·CarSim提供了一个GUI,用于浏览可用变量列表,按几个类别排序。
·所有变量都以文本和电子表格格式在文档文件中描述。
·输出文件可以用几种二进制形式写成(32-
位和64位)或CSV(文本)电子表格格式。
·输出变量用于多种用途:o绘制显示车辆行为的图表。
o输入后处理软件。
o视频可视化的运动信息。
o当新车辆或控制属性生效时,定义VS事件的条件。
o用于运行时添加的公式。
o在模拟过程中导出到其他软件。
3、与Simulink合作? 和外部模型
·在Windows机器上,CarSim数学模型是一个在许多环境中运行的DLL文件:oCarSim运行模型而不需要其他软件。
oModel在MATLAB / Simulink,LabVIEW和其他仿真环境中作为块运行。
oModels可以作为功能模型单元(FMU)运行
使用功能模型接口(FMI)。 FMU可以访问数据库文件或定义为完全自包含的文件。
o模型使用Visual Basic,MATLAB和其他编程语言,可以加载DLL文件并使用VS API访问其功能。
oCarSim包括32位和64位DLL。
·C / C ++可用于扩展数学模型,使用VS API访问数千个参数和变量。
·MATLAB,Visual Basic(VB)和其他语言可以使用Windows COM运行模型以实现自动化。
·数学模型求解程序被编译为本机代码,用于实时系统与RT测试控制软件的接口。
·CarSim有一个LINEARIZE命令,用于生成在MATLAB中使用的线性化A,B,C和D矩阵。
·CarSim具有内置命令,用于添加力和力矩来扩展模型。
3、输入变量
·可以将外部模型的计算和硬件在环(HIL)的测量结果导入CarSim。这些包括大多数力和力矩,流体压力,控制,每个轮胎下的地面几何形状等。
·车辆模型可以导入数百个内置变量的值。
·大多数导入变量可以使用以下三种模式之一与原始内部变量组合:
替换原生变量,
添加到原生变量,或
与原生变量相乘。
·CarSim提供了一个浏览器,用于从所有可用列表中激活导入变量。
·可以在运行时定义新的导入变量以传递来自其他软件的数据。例如,来自Simulink的变量可以传递给动画师。
4、导出变量
·可用于写入输出文件的所有变量也可用于导出到Simulink或外部代码。
·只有在运行时激活变量才会导出,因为需要与外部模型兼容。·可以在运行时定义新的导出变量。
三、多体模型规格
1、状态变量和自由度
CarSim具有用于多体系统动力学的常微分方程(ODE),包括刚体,流体,轮胎,控制器和其他动态部件。
·用于四轮车辆的多体机械系统具有15个机械自由度(DOF):o簧载质量是具有六个自由度的刚体。
o每个悬架都有两个DOF。(3D运动遵循K&Ctests的约束数据。)
o每个车轮都有一个旋转自由度。
o转向系统有一个DOF。
·四轮车的数学模型超过110
常微分方程(ODEs)。每个多体DOF有两个方程;其他方程表示组件的动态:o每个轮胎有两个DOF用于滞后响应。
o MF-Tire / MF-Swift和FTire增加了更多的DOF。
o每个执行器中的制动液都有一个DOF。
o每个制动器的温度都有一个DOF。
o发动机曲轴有一个DOF。
o节气门有一个自由度滞后。
o燃料消耗有一个DOF。
oPower转向和动力制动器各增加一个DOF。
·发动机支架型号增加了六个DOF。
·数学模型需要超过250个状态变量
(以及参数和可配置的函数定义)以完全定义系统的状态。这些包括ODE变量加上其他变量:
。每个摩擦元件都具有滞后状态(悬架弹簧,转向系统,低 -
速度轮胎转向)。
o离合器和内置控制器(例如ABS)具有锁定状态。
o其他动态模式条件具有状态变量。
2、方程式
·运动方程是从多个连通刚体的三维运动的第一原理推导出来的。·运动方程是表现良好(非stif)的常微分方程(ODE)。
·内置的VS库提供了六种解决ODE的方法(Adams-Bashforth,Adams-Moulton,Runge-
Kutta和Euler方法)。
·所有方法都在固定的时间步长运行,适用于实时应用程序。
·算法适用于测量和采样数据源,即使存在不连续性。
·对方程式进行了大量优化编译,以便单独使用或与其他软件(例如Simulink,LabVIEW)一起使用。
3、初始化和重新启动
·CarSim支持许多初始化选项,从自动到详细规范任何状态变量。
·在每次运行结束时保存车辆模型的完整状态,以支持继续使用高级自动化和优化方法。
·模型的状态可以在运行期间保存并在运行期间完全恢复,以支持高级优化方法和重复测试序列。
本文地址:http://www.sd124.com/article/2018/1217/227576.html
《carsim 2017 图文激活教程》由闪电下载吧整理并发布,欢迎转载!