
矩阵实验室MATLAB R2018b破解版是一款功能强大的可用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,其目的是帮助用户更加轻松的进行商业业数科学计算、数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等,完美的将所有的功能集于一身,为用户的需求提供了真正的一体化科学解决方案,解决各种技术计算问题,不仅是学校中的标准教学工具,也可在工业生产中提高研究开发效率,完美缩短项目周期和避免项目错误,发现并解决问题,MATLAB可以进行矩阵运算、绘制函数和数据、实现算法、创建用户界面、连接其他编程语言的程序等,主要应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。软件完美汲取其它数学软件的优势并加以改进,让它更加强大,MATLABR 2018b新版本加入了对C,FORTRAN,C++,JAVA的支持。并提供了深度学习功能,可使用DeepNetworkDesigner应用程序编辑网络,使用网络分析器实现可视化,自动进行视频标注,将模型导出到ONNX,并部署到NVIDIA、Intel和ARM处理器,智能编辑创建模块端口,并可在图标上直接编辑修改模块参数等,全世界数以百万计的工程师和科学家都在使用 MATLAB® 分析和设计改变着我们的世界的系统和产品。基于矩阵的 MATLAB 语言是世界上表示计算数学最自然的方式。可以使用内置图形轻松可视化数据和深入了解数据。欢迎您使用桌面环境进行试验、探索和发现。这些 MATLAB 工具和功能全部进行了严格测试,可彼此配合工作。MATLAB 可帮助您不仅仅将自己的创意停留在桌面。您可以对大型数据集运行分析,并扩展到群集和云。MATLAB 代码可以与其他语言集成,使您能够在 Web、企业和生产系统中部署算法和应用程序。本次小编带来的 是MATLAB R2018b最新破解版,含详细的安装破解授权激活图文教程,有需要的朋友不要错过了!
安装破解教程
1、在本站下载并解压,得到R2018b_win64.iso镜像文件和MATLAB R2018b Win64 Crack破解文件夹
2、有旧版本的请先卸载旧版本,加载R2018b_win64.iso,双击setup.exe运行安装软件,如图所示,勾选使用文件安装密钥选项,点击 下一步
3、许可协议条款,勾选是,点击 下一步
4、勾选我已有我的许可证的文件安装密钥,并输入09806-07443-53955-64350-21751-41297,点击下一步
5、点击浏览按钮选择软件安装路径,点击下一步

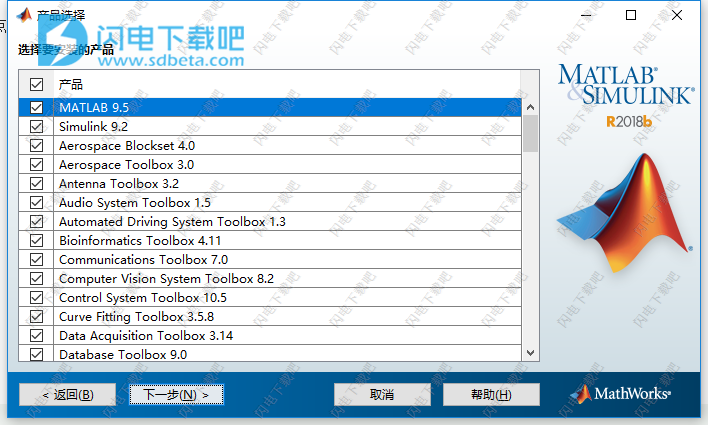
6、如图所示,选择需要安装的产品,进行勾选即可,点击下一步
7、勾选创建桌面和开始菜单快捷方式,点击下一步

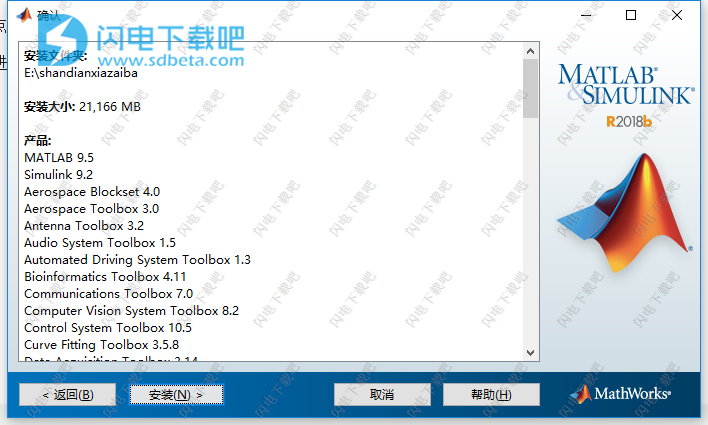
8、确认安装信息,并点击安装按钮开始安装
9、安装过程比较久,大家耐心等待吧

10、经过漫长的等待,终于安装完成了,真的是太不容易了
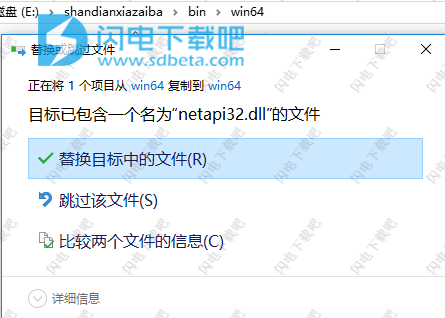
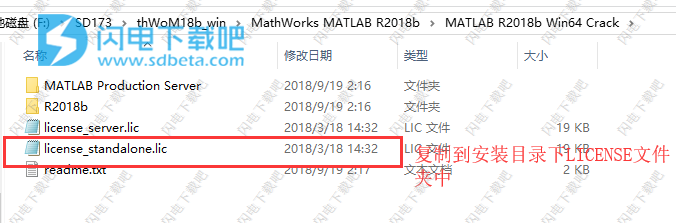
11、先不要运行软件,将压缩包MATLAB_R2018b_Win64_Crack\MATLAB R2018b Win64 Crack\R2018b\bin\win64下的netapi32.dll文件复制到安装目录中,点击替换目标中的文件
12、两种授权激活方法,将MATLAB R2018b Win64 Crack文件夹内的license_standalone.lic文件复制到安装目录license目录里面,默认在"C:\Program Files\MATLAB\R2018b\licenses"
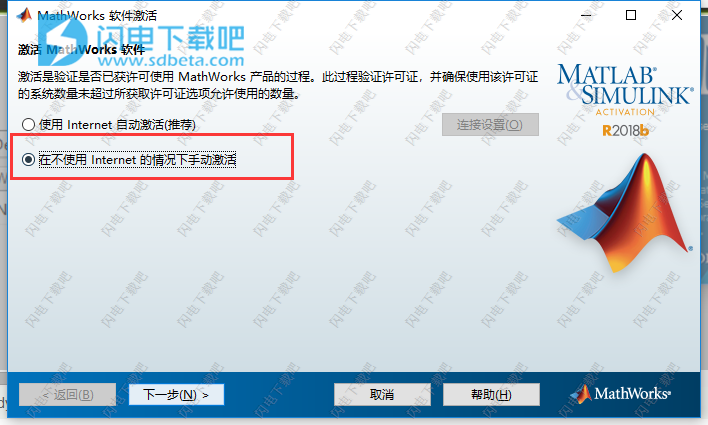
13、或者选择直接运行软件,如图所示,选择手动激活选项
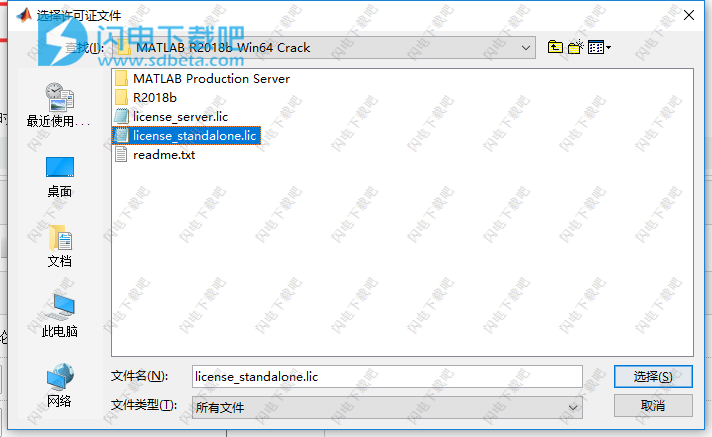
14、如图所示,勾选输入许可证文件的完整路径,这里我们导入license_standalone.lic文件

15、激活成功
|
MATLAB 2018b新功能介绍
MATLAB深度学习的新增功能
MATLAB让人人都能够轻松运用深度学习,即使您不是专家。查看设计和构建您自己的模型、网络训练和可视化以及部署的最新功能。
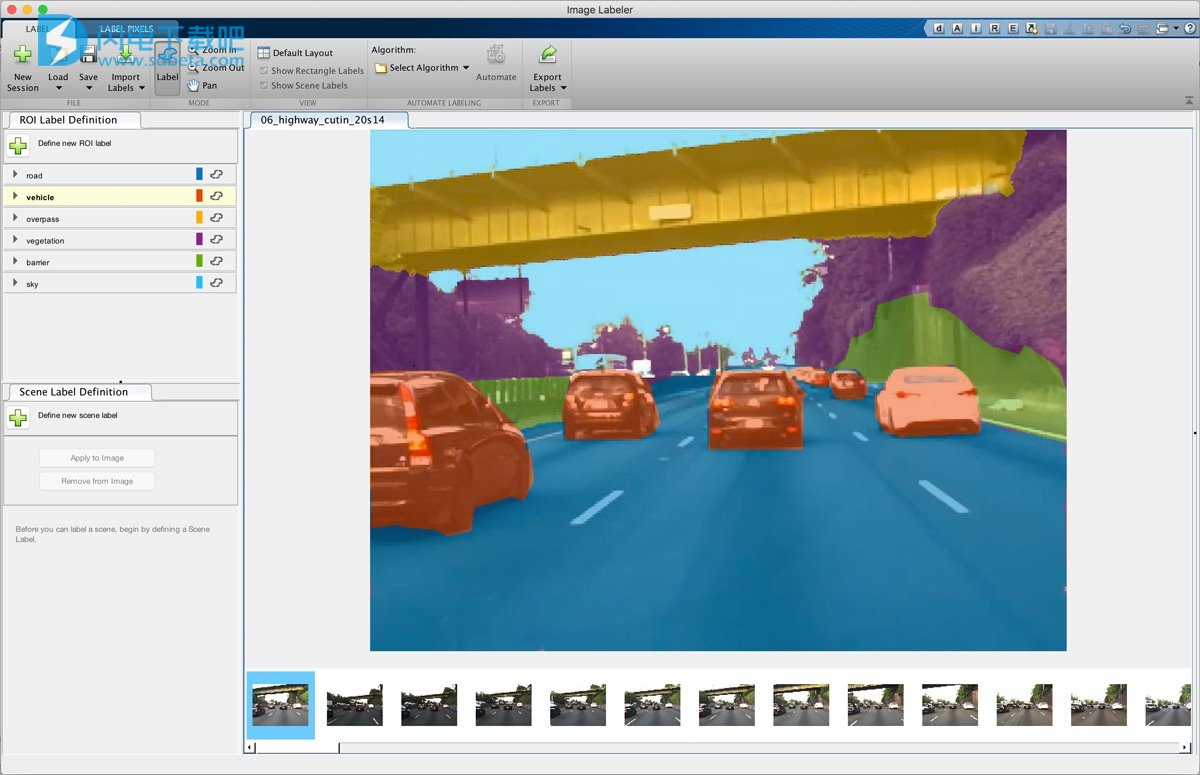
1、数据准备和标注
·提供App进行像素和区域标注,用于语义标注和目标检测
·提供API自动化真实值(ground-truth)标注
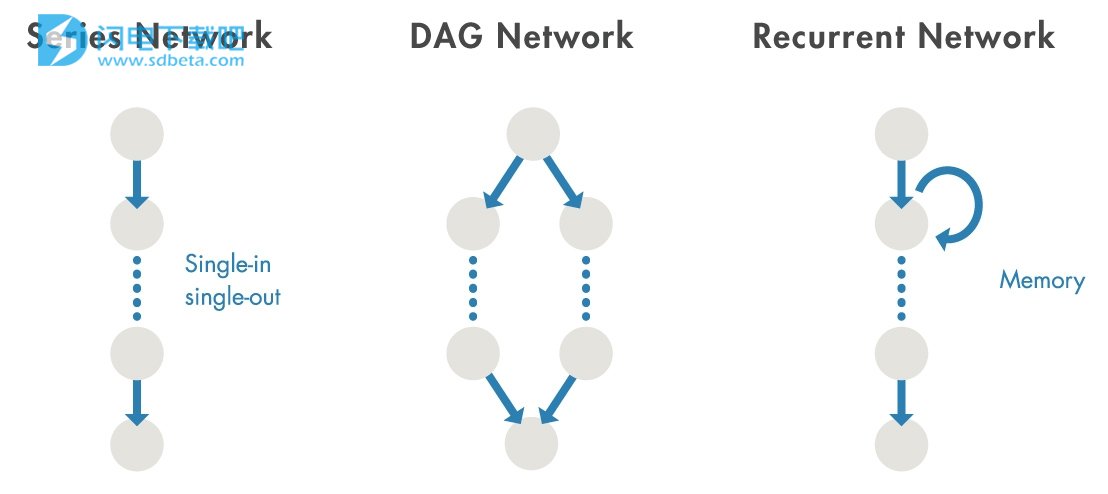
2、网络架构
·提供有向无环图(DAG)网络来表示复杂网络架构
·提供长短期记忆(LSTM)网络对时序、文本和信号数据进行预测和分类
·提供语义分割可进行像素级分类
·新特性用于连续时间序列输出的回归和双向LSTM
·自定义层支持:定义新的层,并为分类和回归输出层指定损失函数
·新特性自动验证自定义层,检查数据大小和类型一致性
3、访问最新的预训练模型
·TensorFlow-Keras 模型导入器
·导入来自Caffe的模型(包括Caffe Model Zoo)
·GoogLeNet、VGG-16、VGG-19、AlexNet、ResNet-50、ResNet-
101和Inception-v3
·即将推出:Inception-ResNet-v2、SqueezeNet

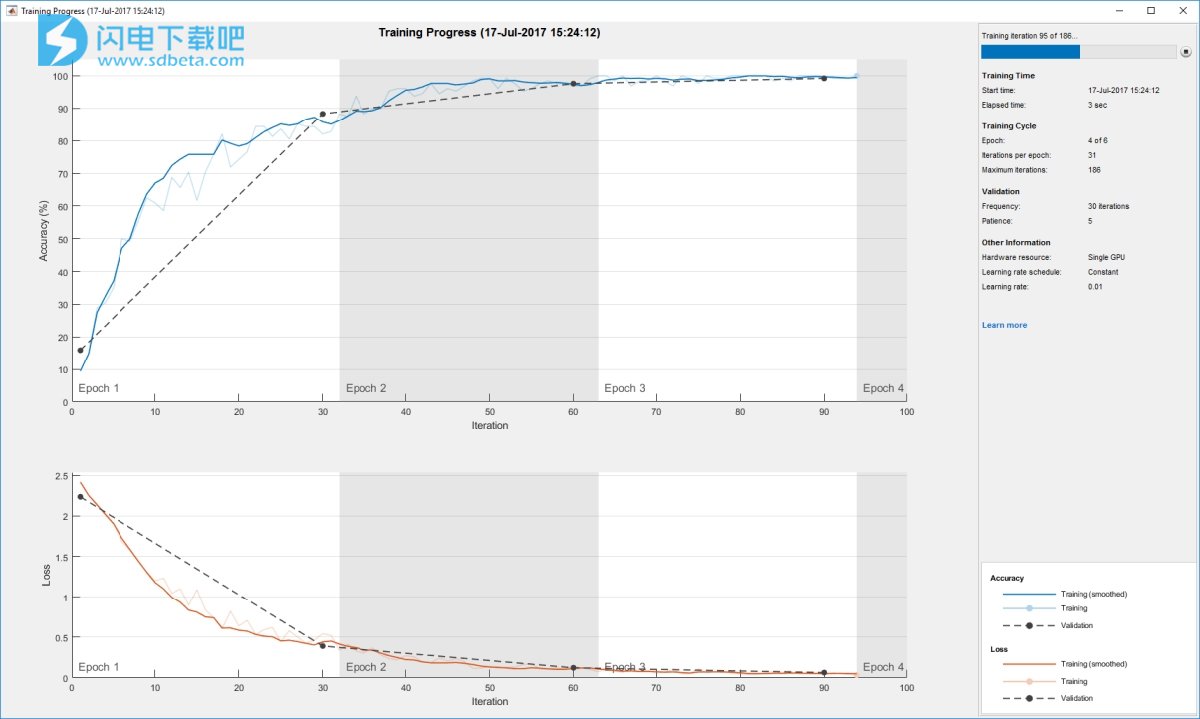
4、网络训练
·自动验证网络性能,在性能不再改善时停止训练
·使用贝叶斯优化执行超参调优
·新特性更多的训练优化器:ADAM与RMSprop
·新特性 并行化及在多GPU上训练DAG网络
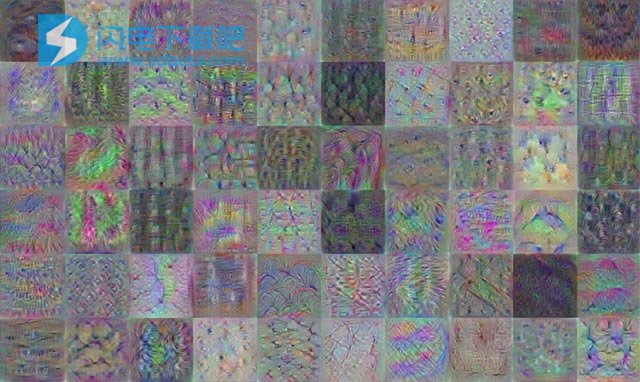
5、调试和可视化
·新特性DAG激活状态:为GoogLeNet和Inception-
v3等网络可视化中间层激活状态
·可在训练过程中绘制精度、损失和验证结果
·即将推出使用网络分析器APP绘制和分析您的网络
6、部署
·能够使用GPU Coder 自动将MATLAB中的深度学习模型转换为CUDA代码
·新特性|支持DAG网络,包括GoogLeNet、ResNet-
50、ResNet-101、Inception-v3和SegNet
·新特性|支持Intel和ARM处理器
·新特性生成与TensorRT集成的CUDA代码
Simulink的新功能
我们一直在更新Simulink®。了解最新功能和探索最新特性。
1、智能编辑
自动创建端口:通过点击或拖动模块外形创建端口
预测性快速插入:将建议模块连接到模型中的现有模块,按使用频率排序
在模块图标上编辑:修改模块参数,而无需打开对话框
端口连接提示:在绘制信号线时高亮显示兼容的端口
隐藏模块名称:通过隐藏默认的模块名来改善模型外观
缩减总线布线:可快速将信号合成为总线,并自动创建总线元素端口,以便在子系统之间以及内部使用较少的信号线
2、仿真分析
自定义仪表模块:创建具有完全可自定义外观的仪表
仿真数据检查器中的图数据:在仿真数据检查器中查看与信号数据同步的图数据
仿真步调:以实际时钟速度或其他指定步速运行仿真,从而提高可视化水平
实时编辑器中的仿真数据检查器:在实时编辑器中直接添加、查看和编辑仿真数据检查器绘图
采样时间图例:通过用新的采样时间图例进行高亮显示,交互式地识别模型中的速率
诊断处理:直接修复来自诊断消息的错误和警告(比如代数环),并管理未显示的诊断
穿越点消息:创建用于调试的消息并将其发送到Stateflow和SimEvents,以表示Simulink中用于混合系统建模的事件
3、性能改进
指定执行域:通过指定您的模型内子系统的域,从而改进求解器性能和代码
Simulink缓存:使用共享模型工件更快地获取仿真结果
即时加速构建:快速构建顶级模型,使得在加速器模式下运行仿真时实现性能提升
4、并行仿真
批量仿真:通过使用batchsim,将仿真的执行分载到后台运行
仿真管理器:监视、检查和可视化仿真进度及结果
并行仿真:使用parsim命令直接运行多个并行仿真任务
5、运行时软件建模
行主序的数组布局:通过指定查找表的数组布局和其他模块作为行主序,简化与外部C/C++函数、工具和库的集成
可调度组件:显式地进行模型调度以仿真和适应软件环境
局部Simulink函数:为可重用软件组件,创建可跨越模型边界的Simulink函数
初始化和终止函数模块:对事件做出响应,对动态启动和关闭行为进行建模
6、项目管理
项目引用:直接从您的Simulink项目中浏览全部项目引用层次结构和关联文件
全项目总线重命名:在您重命名一个总线或总线元素时,在整个Simulink项目内自动更新所有总线引用
模块比较:使用自定义筛选器简化和聚焦模型比较
影响分析:轻松识别Simulink项目中模块或需求变化的依赖性关系和影响
自动创建项目将文件夹轻松转换为项目,并在同一个位置管理文件、数据和环境
7、数据管理
模块参数自动填写:在键入时从建议的变量或函数名称中选择,可提高模块参数编辑的速度和准确性
未定义变量检测:在编辑模型时可以得到缺失变量的即时通知
模型设计数据:允许数据字典访问基本工作区,将多个(数据)源用于您的设计数据
信号编辑器:创建和编辑输入信号,将其组织起来用于多个仿真
模型数据编辑器:轻松查看、筛选、分组和编辑模型所使用的更多数据,包括信号、状态和引用的变量
8、基于组件的建模
CCaller模块:直接从模型中调用外部C函数
总线:从Simscape物理连接线创建总线,并在虚拟总线内保留总线数组和非虚拟总线
总线中的变体信号:使用变体条件,动态地添加和移除总线元素
Simulink变体:通过使用改进的变体子系统和变体条件传播功能,创建更加可定制的变体模型
5G工具箱
模拟,分析和测试5G通信系统的物理层
5G Toolbox™为5G通信系统的建模,仿真和验证提供符合标准的功能和参考示例。该工具箱支持链路级仿真,黄金参考验证和一致性测试以及测试波形生成。
使用工具箱,您可以配置,模拟,测量和分析端到端通信链路。您可以修改或自定义工具箱功能,并将其用作实施5G系统和设备的参考模型。
该工具箱提供了参考示例,可帮助您探索基带规范并模拟RF设计和干扰源对系统性能的影响。您可以生成波形并自定义测试平台,以验证您的设计,原型和实现是否符合3GPP 5G新无线电(NR)标准。
1、波形生成
为3GPP5GNR版本15生成符合标准的波形。使用生成的波形作为5G设计的黄金参考。
2、NR副载波和命理学
基于灵活的NR子载波间隔和帧数字生成OFDM波形,包括载波带宽部分(CBP)。
3、链路级仿真
执行5GNRRelease15的链路级仿真。执行发送器,信道建模和接收器操作。通过计算误码率(BER)和吞吐量指标来分析链路性能。
4、吞吐量测试
表征5GNR链路级性能,并执行PDSCH吞吐量仿真。
5、下行链路信道和信号
模拟5GNR下行链路处理。配置并生成物理信号和通道。
6、下行频道
创建包括共享(PDSCH),控制(PDCCH)和广播(PBCH)信道的下行链路物理信道。
7、下行信号
指定同步(PSS,SSS)和解调参考(DM-RS)信号。
8、传输通道和控制信息
配置并生成下行链路传输信道(BCH,DL-SCH)和控制信息。模拟信道编码算法,包括代码块分段和去分段,速率匹配和恢复。
9、LDPC编码
使用低密度奇偶校验(LDPC)编码来编码和解码传输信道,包括下行链路共享信道(DL-SCH)。
10、极地编码
模拟NR5G极地信道编码技术。应用CRC辅助极化编码来编码和解码用于增强型移动宽带(eMBB)的下行链路控制信息(DCI)和广播信道(BCH)。
11、渠道建模
使用5GNRTR38.901传播信道模型执行块错误率(BLER)模拟。
12、CDL频道模型
模拟聚类延迟线(CDL)通道模型。
13、TDL信道模型
模拟抽头延迟线(TDL)通道模型。
14、细胞搜索程序
执行小区搜索和选择过程以获得初始系统信息,包括主信息块(MIB)。
15、同步
构造包含同步信号(SS)突发的波形,通过衰落信道传递波形,并盲目同步以接收波形。
16、MIB解码
提供解码主信息块(MIB)的详细过程。
17、开放,可定制的算法
使用5GNR可自定义和可编辑算法作为设计验证的黄金参考。从开放的MATLAB算法生成C代码。
18、打开MATLAB代码
使用全面的发送器,通道模型和接收器操作,表示为开放和可定制的MATLAB®代码。
19、C和C++代码生成
生成C或C++源代码以加速模拟,获取C源代码以实现,或用作独立可执行文件。
汽车
运行 Euro NCAP 测试,驶过虚拟城市场景,执行虚拟发动机标定。
汽车工程组织必须提供符合其客户当前和未来环境要求的传统车辆和“绿色”或替代燃料车辆。 他们必须与较小的团队合作,并减少车辆计划之间的时间。
为了应对这一挑战,全球领先的工程组织已经从纸张和原型设计方法转变为基于模型的设计。
这些组织使用MATLAB®和Simulink®加速嵌入式控制器开发和校准,并提供满足市场对安全性,舒适性,功能性,燃油经济性和车辆性能要求的车辆。
传感器融合和跟踪工具箱
设计和模拟多传感器跟踪和导航系统
传感器融合和跟踪工具箱™包括用于设计,仿真和分析系统的算法和工具,这些系统融合来自多个传感器的数据,以保持位置,方向和态势感知。参考示例为实施机载,地面,船载和水下监视,导航和自主系统的组件提供了一个起点。
1、轨迹和场景生成
生成基于地面真实路径点和基于速率的轨迹和场景。用于跟踪方案的模型平台和目标。
2、生成对象姿势
定义并转换不同参考系中对象的真实位置,速度和方向。
3、创建跟踪方案
模型平台,如飞机,地面车辆或船舶。平台可以携带传感器并提供信号源或反射信号。平台可以是静止的或运动的,携带传感器和发射器,并包含反映信号的与方面相关的特征。
4、旋转,方向和四元数
使用四元数,欧拉角,旋转矩阵和旋转矢量表示方向和旋转。定义相对于车身框架的传感器方向。
5、传感器型号
在不同的环境条件下模拟IMU(加速度计,陀螺仪,磁力计),GPS接收器,雷达,声纳和IR的测量结果。
6、惯性和GPS传感器
模型IMU(惯性测量单元),GPS(全球定位系统)和INS(惯性导航系统)。调整模型的温度和噪声属性等环境参数,以模拟真实环境。
7、主动传感器
模拟雷达和声纳传感器和发射器,以生成目标的检测。模拟方位角和/或仰角的机械和电子扫描。
8、被动传感器
RWR型(雷达警告接收器),ESM(电子支持测量),被动声纳和红外传感器,用于生成仅用于跟踪场景的仅角度检测。定义发射器和通道属性以9模拟干扰。
9、惯性传感器融合
使用针对不同传感器配置,输出要求和运动约束进行优化的算法,估计方向和位置随时间的变化。
10、方向估计
保险丝加速度计和磁力计读数模拟电子罗盘(eCompass)。保险丝加速度计,陀螺仪和磁力计读数,带有姿态和航向参考系统(AHRS)滤波器。
11、姿势估计
使用惯性传感器和GPS估计有无非完整航向约束的姿势。通过将惯性传感器与高度计或视觉里程计融合来确定没有GPS的姿势。
12、估算过滤器
将卡尔曼,粒子和多模型滤波器用于不同的运动和测量模型。
13、对象跟踪过滤器
使用线性,扩展和无迹卡尔曼滤波器估算对象状态,用于线性和非线性运动和测量模型。使用高斯和和粒子滤波器进行非线性,非高斯状态估计,包括仅使用范围或仅角度测量的跟踪。通过交互式多模型(IMM)滤波器改进对机动目标的跟踪。
14、运动和测量模型
配置具有恒定速度,恒定加速度,恒定转弯和笛卡尔自定义运动模型的跟踪滤波器,以及球面和修改的球面坐标系。定义位置和速度,范围角度,仅角度或自定义测量模型。
15、多目标跟踪
创建多对象跟踪器,融合来自各种传感器的信息。保持关于其跟踪的对象的单个或多个假设。
16、跟踪器
将估计滤波器,分配算法和轨道管理逻辑集成到多目标跟踪器中,以将检测融合到轨道中。在具有挑战性的场景中使用多假设跟踪器(MHT),例如在模糊性下跟踪紧密间隔的目标。
17、跟踪分配
找到全局最近邻居(GNN)分配问题的最佳或k最佳解决方案。解决S-D分配问题。将检测分配给轨道或轨道跟踪。根据最近的曲目历史记录或曲目分数确认和删除曲目。
18、跟踪检测融合
保险州和州协方差。静态融合同步检测,包括来自无源传感器的角度检测的三角测量。
本文地址:http://www.sd124.com/article/2018/0919/225760.html
《MATLAB R2018b怎么安装 MathWorks MATLAB R2018b中文详细下载安装学习和授权激活图文教程》由闪电下载吧整理并发布,欢迎转载!